Product List













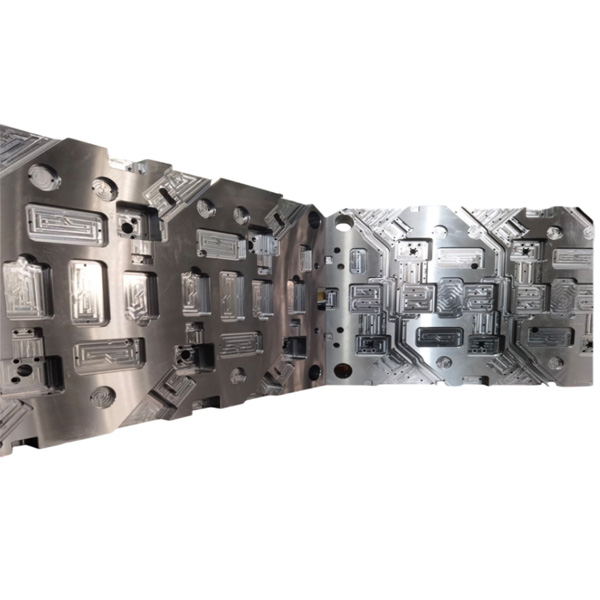
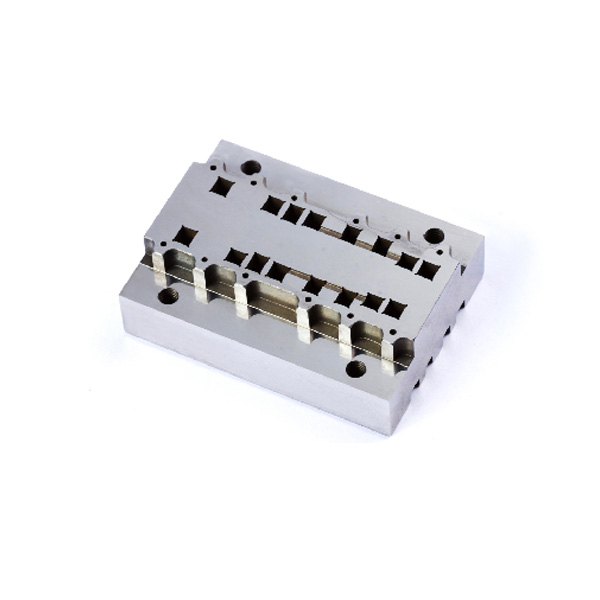
Precision mold








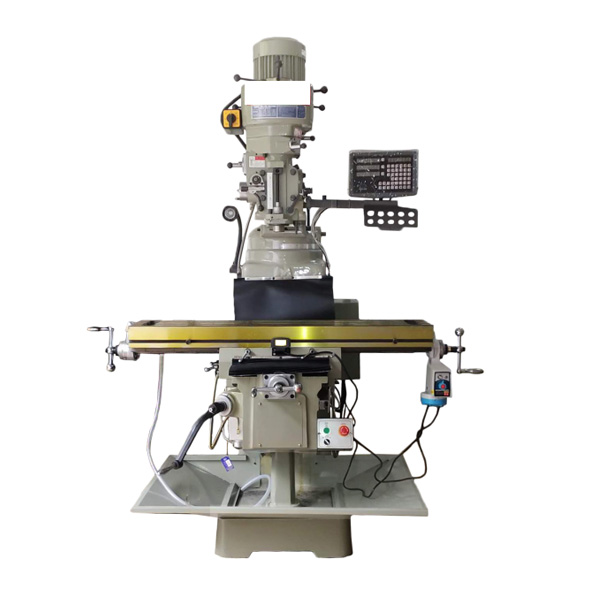
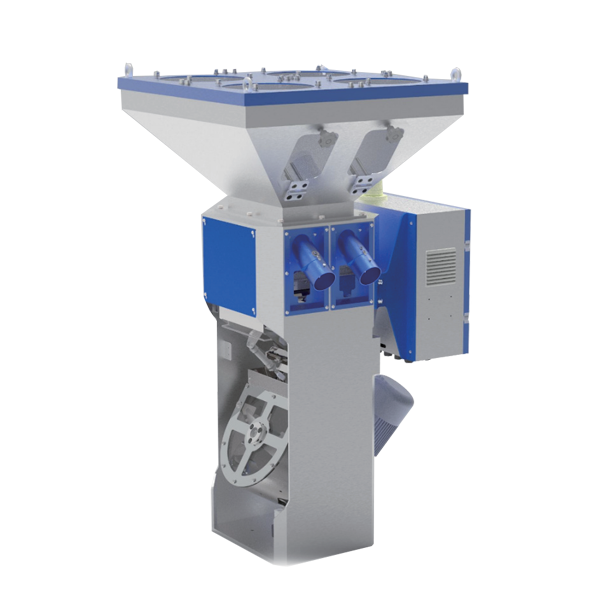
Standard equipment














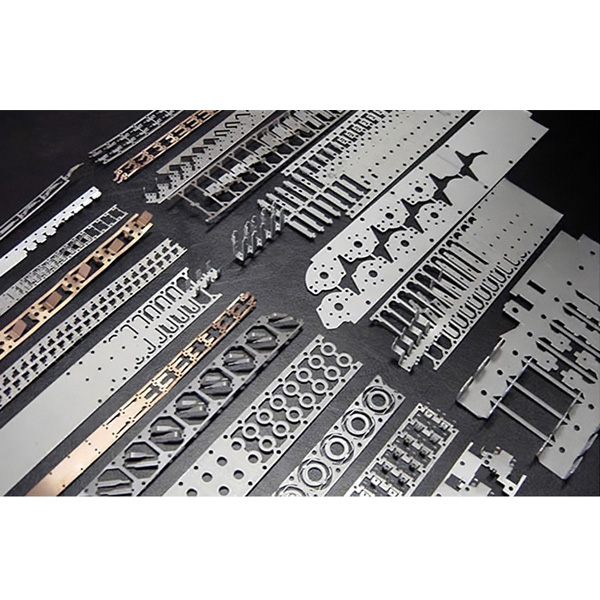
Stamping

Injection molding











Auxiliary equipment
Standard equipment


Standard parts
Auxiliary equipment
Consumables

Tireey Connector
-
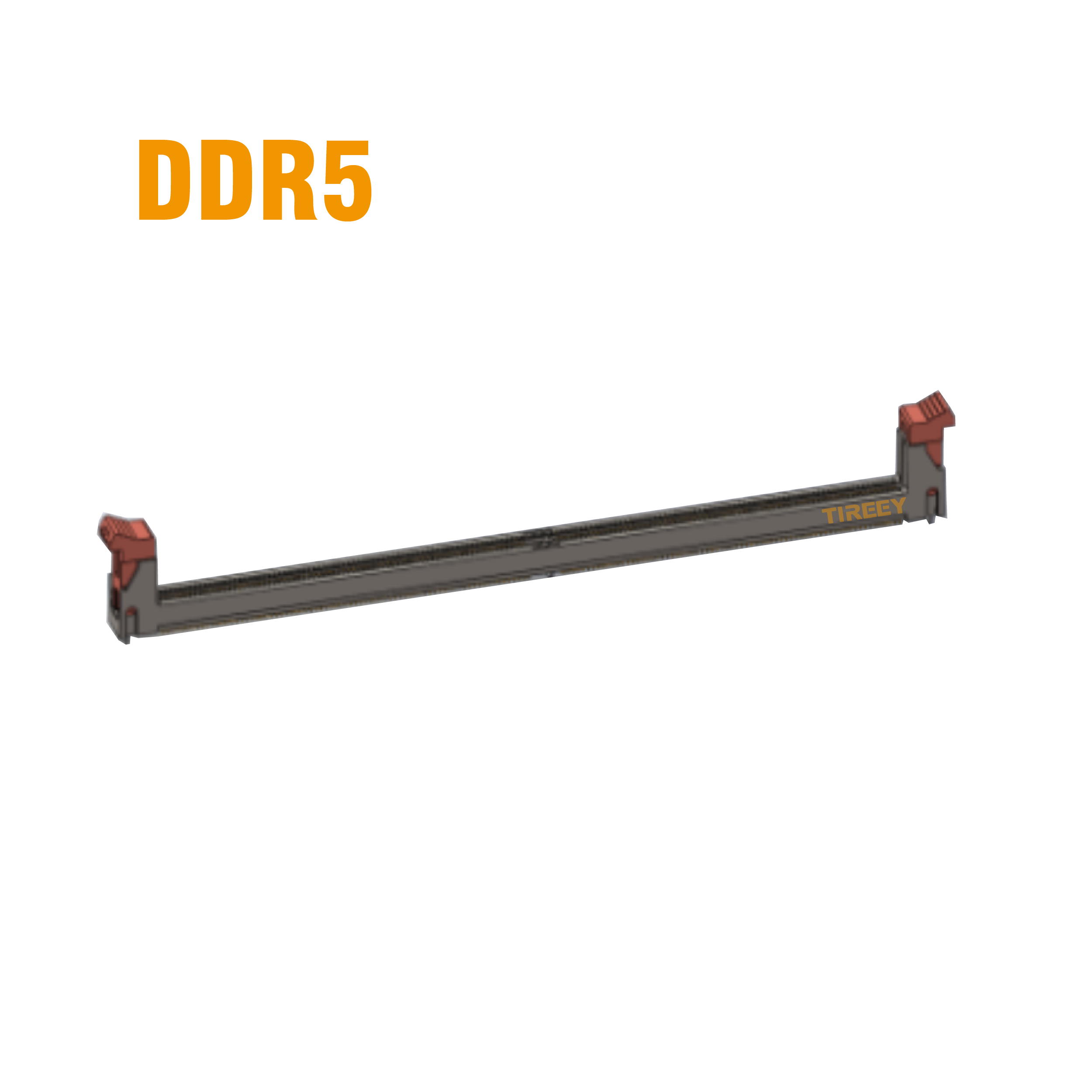 DDR5 288Pin Vertical SMT+DIP 20.6H
DDR5 288Pin Vertical SMT+DIP 20.6H -
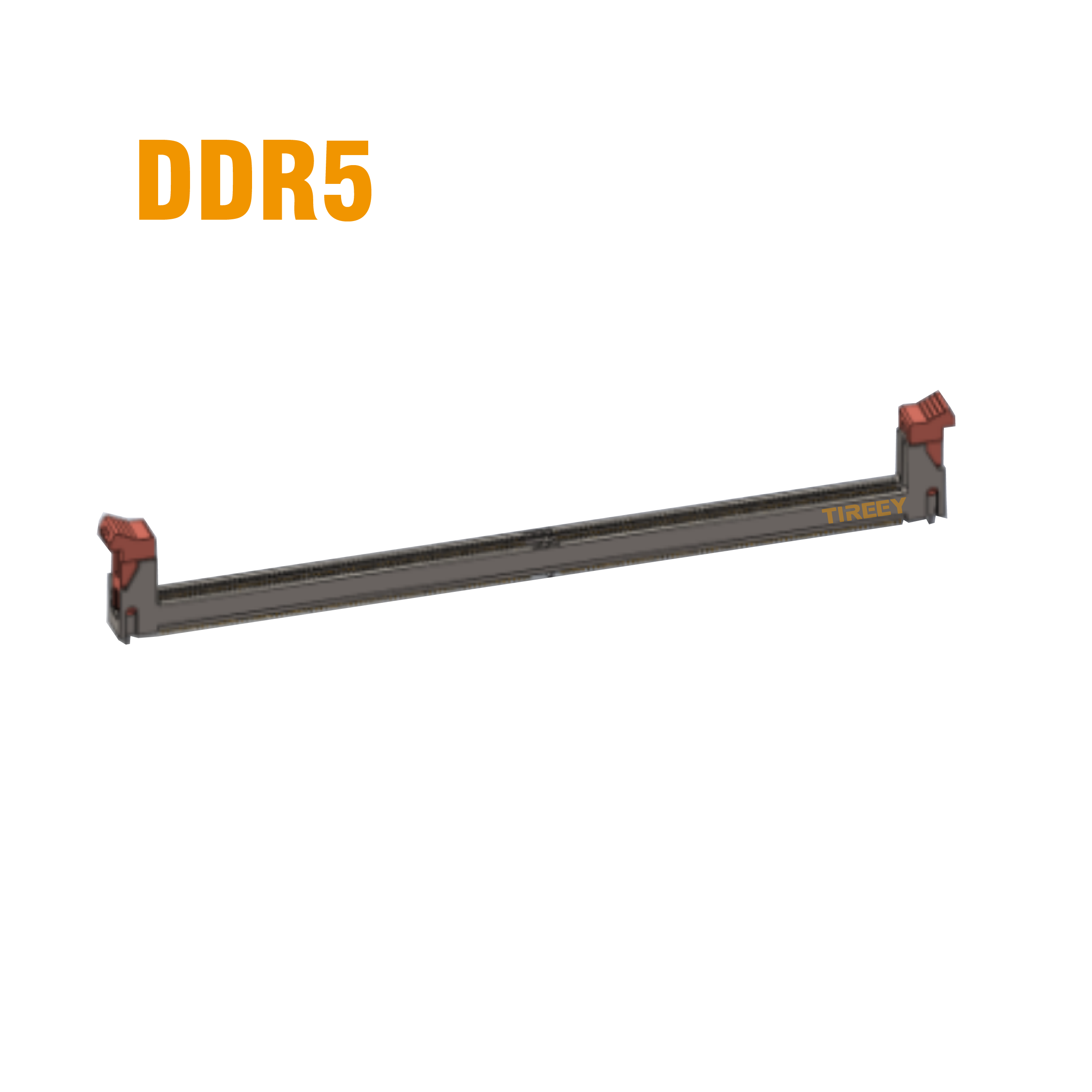 DDR5 288Pin Vertical SMT+DIP 20.6H Single buckle specification
DDR5 288Pin Vertical SMT+DIP 20.6H Single buckle specification -
 DDR5 SO DIMM 262Pin STD 5.2H
DDR5 SO DIMM 262Pin STD 5.2H -
 DDR5 SO DIMM 262Pin RVS 8.0H
DDR5 SO DIMM 262Pin RVS 8.0H -
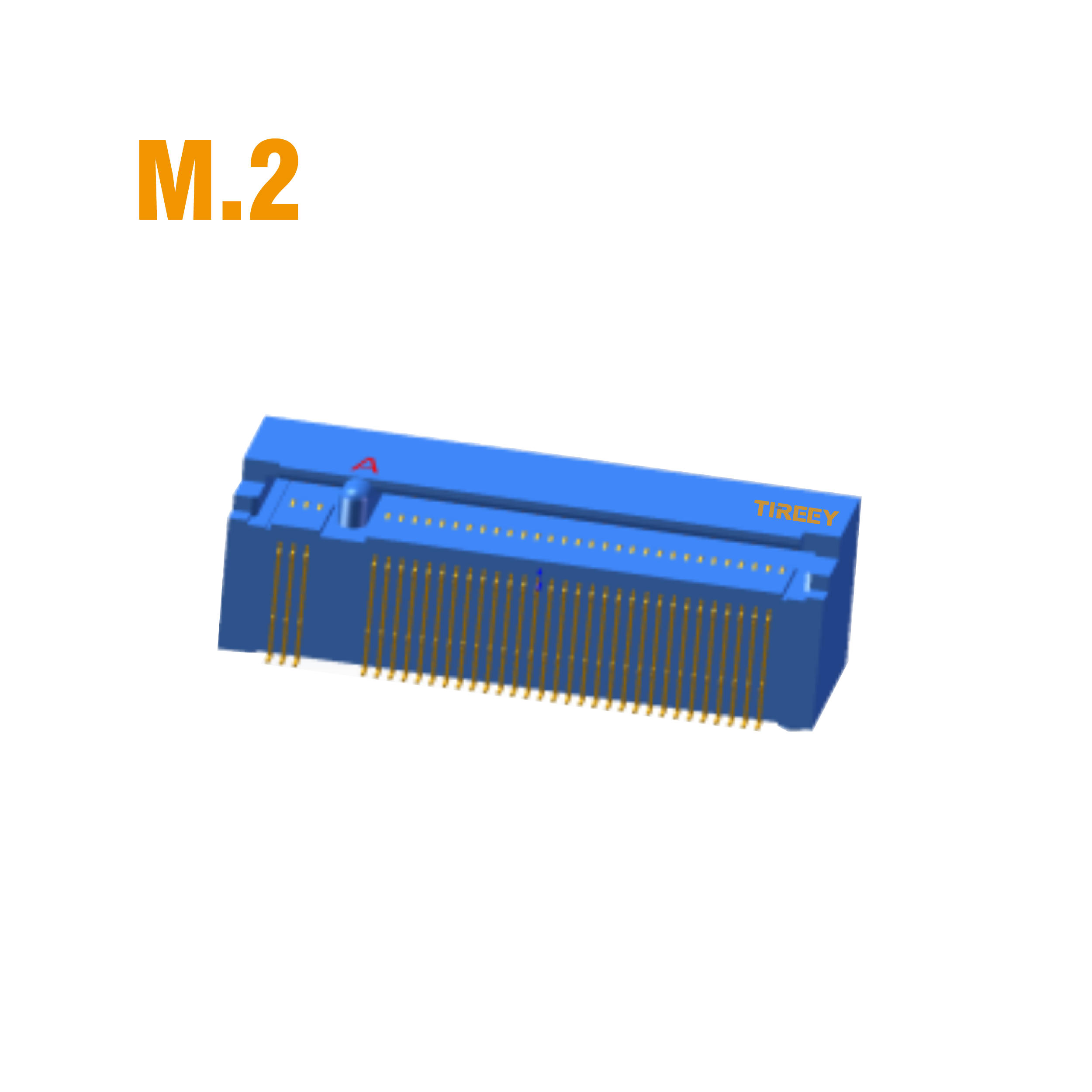 M.2 GEN4 H=8.5 A KEY CONN
M.2 GEN4 H=8.5 A KEY CONN -
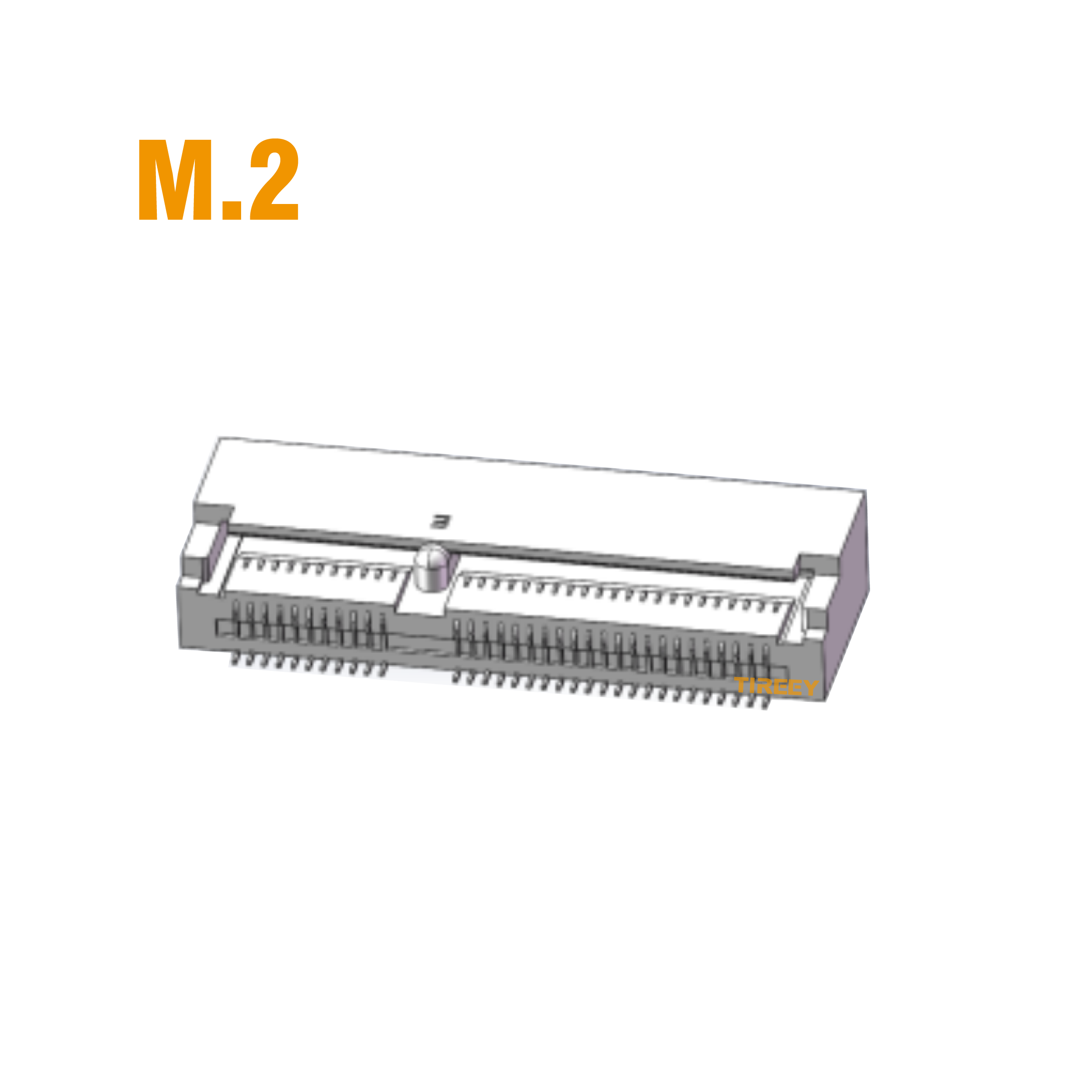 M.2 GEN4 H=4.0 M KEY CONN
M.2 GEN4 H=4.0 M KEY CONN -
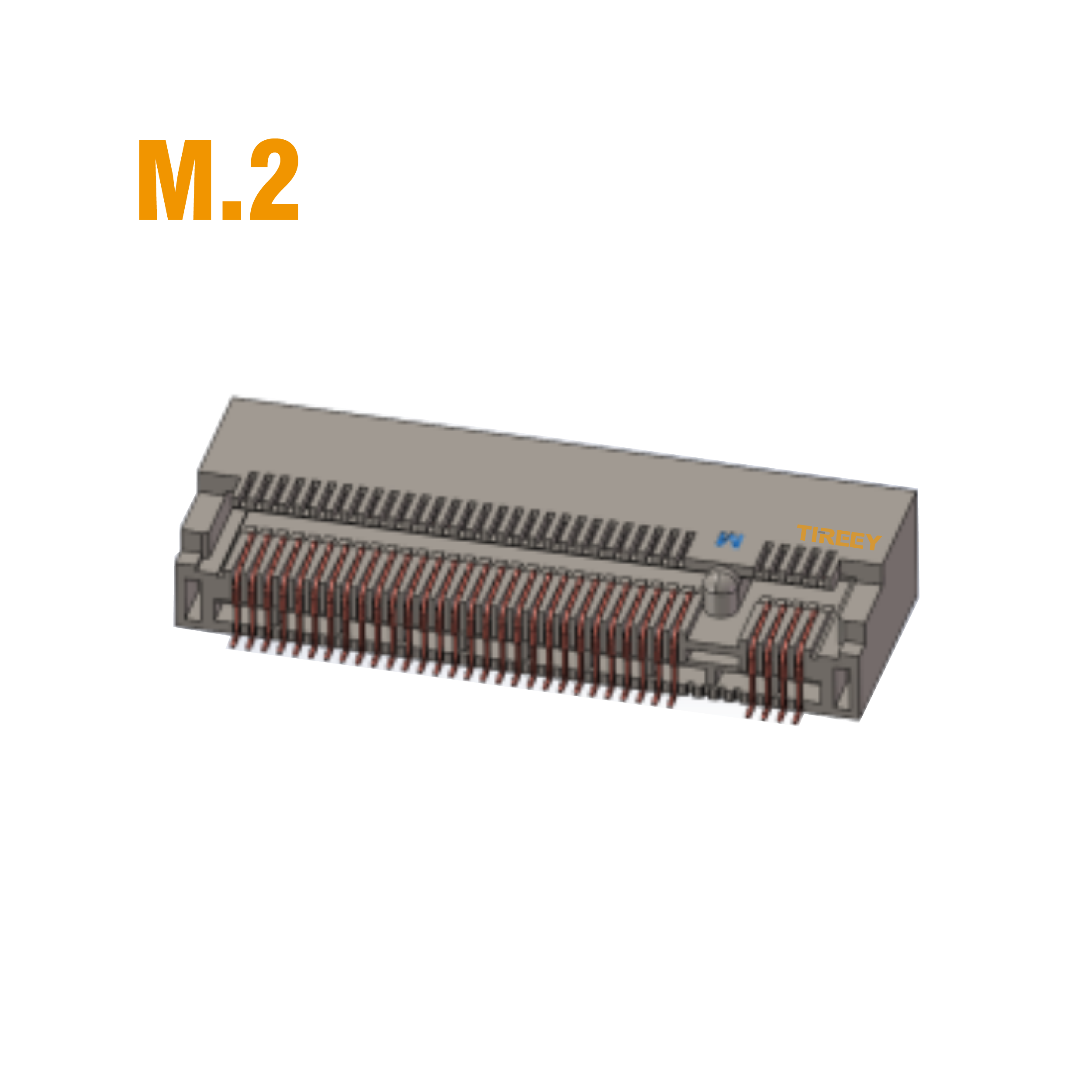 M.2 GEN4 H=4.0 E KEY CONN
M.2 GEN4 H=4.0 E KEY CONN -
 DDR4 288PIN DIP
DDR4 288PIN DIP -
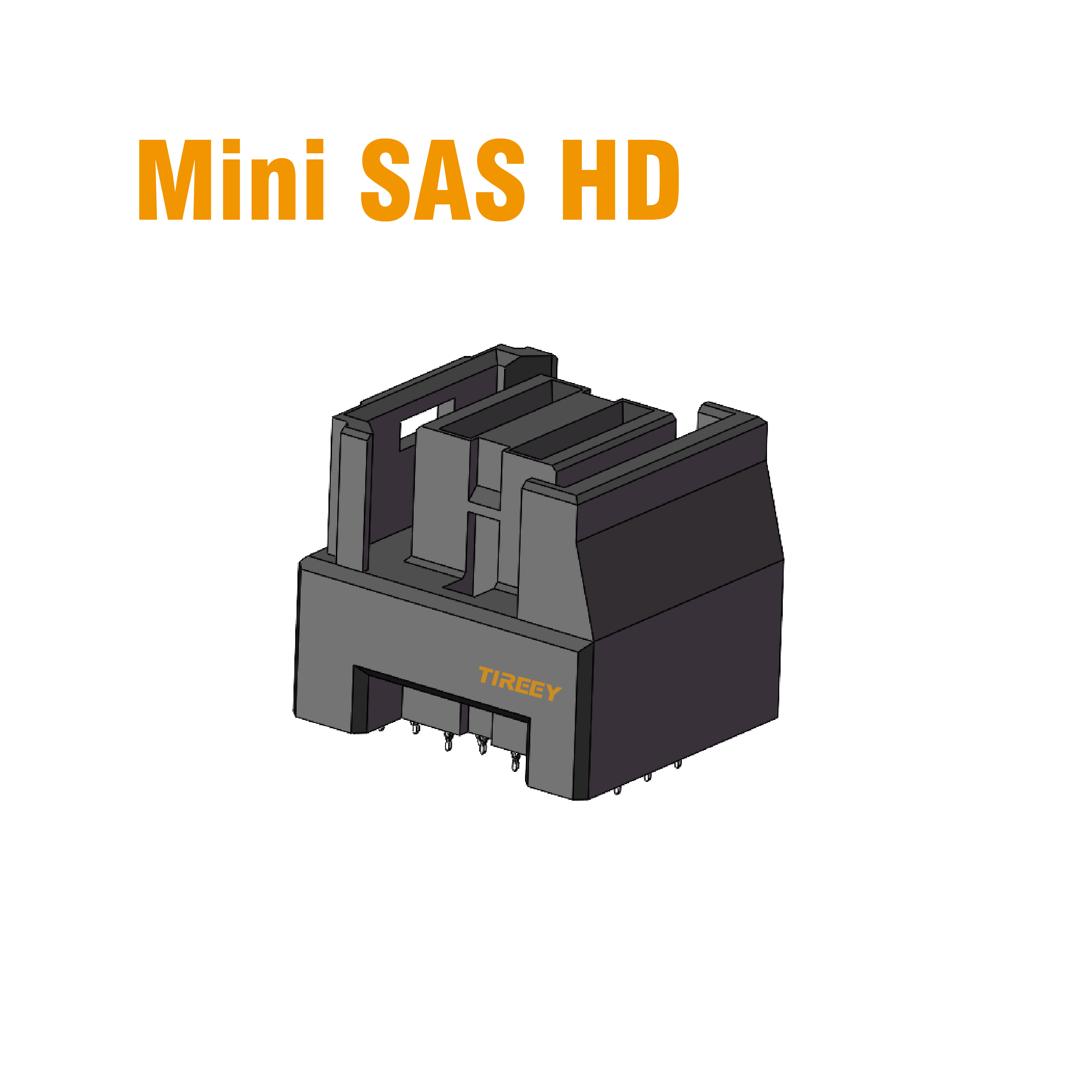 Mini SAS HD Vertical 36P Conn
Mini SAS HD Vertical 36P Conn -
 PCIE4.0 8X 98Pin SMT type
PCIE4.0 8X 98Pin SMT type -
 PCIE4.0 16X 164Pin Tail + Iron Case DIP Type
PCIE4.0 16X 164Pin Tail + Iron Case DIP Type -
 PCIE5.0 16X 164Pin SMT type
PCIE5.0 16X 164Pin SMT type -
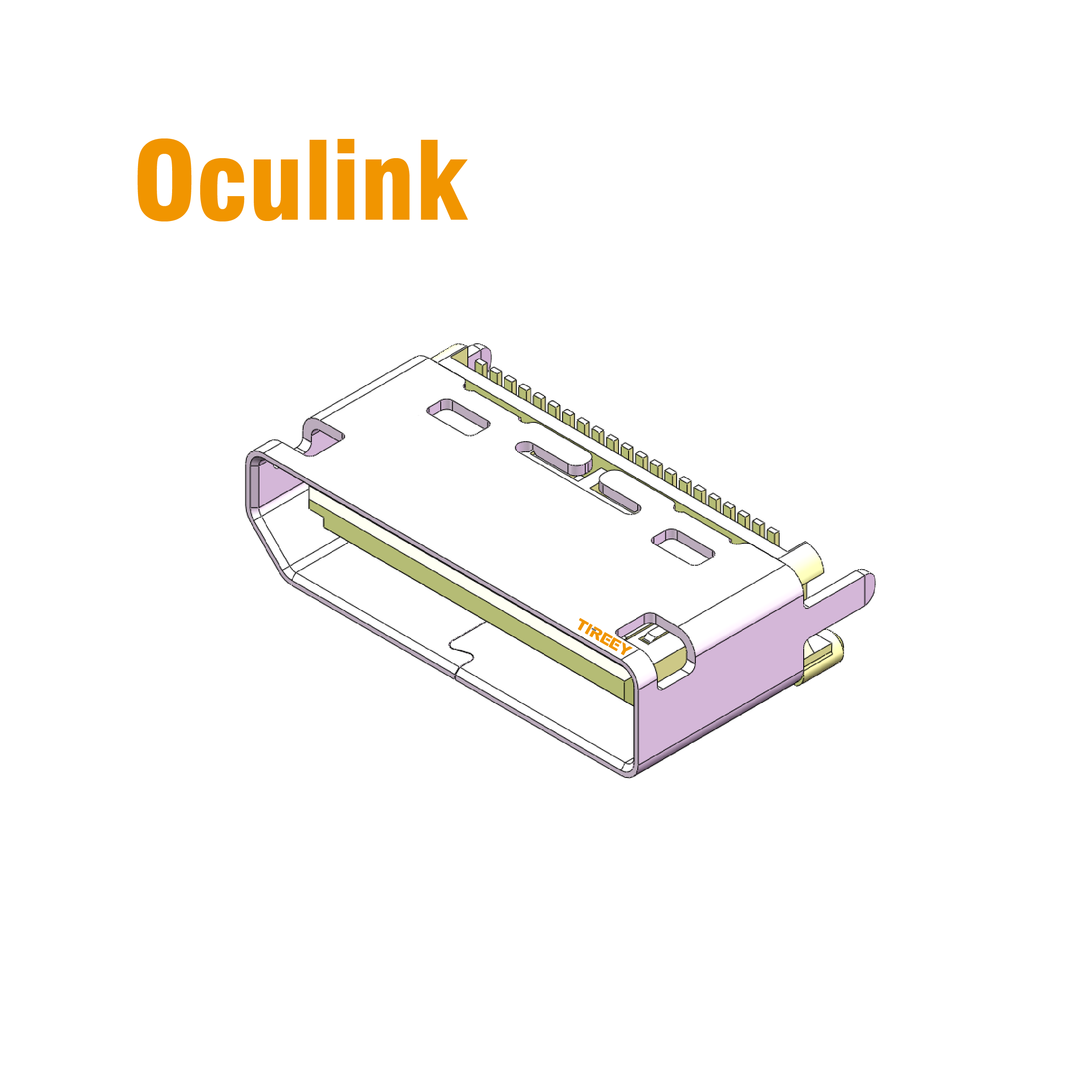 Oculink V/T 4x conn
Oculink V/T 4x conn -
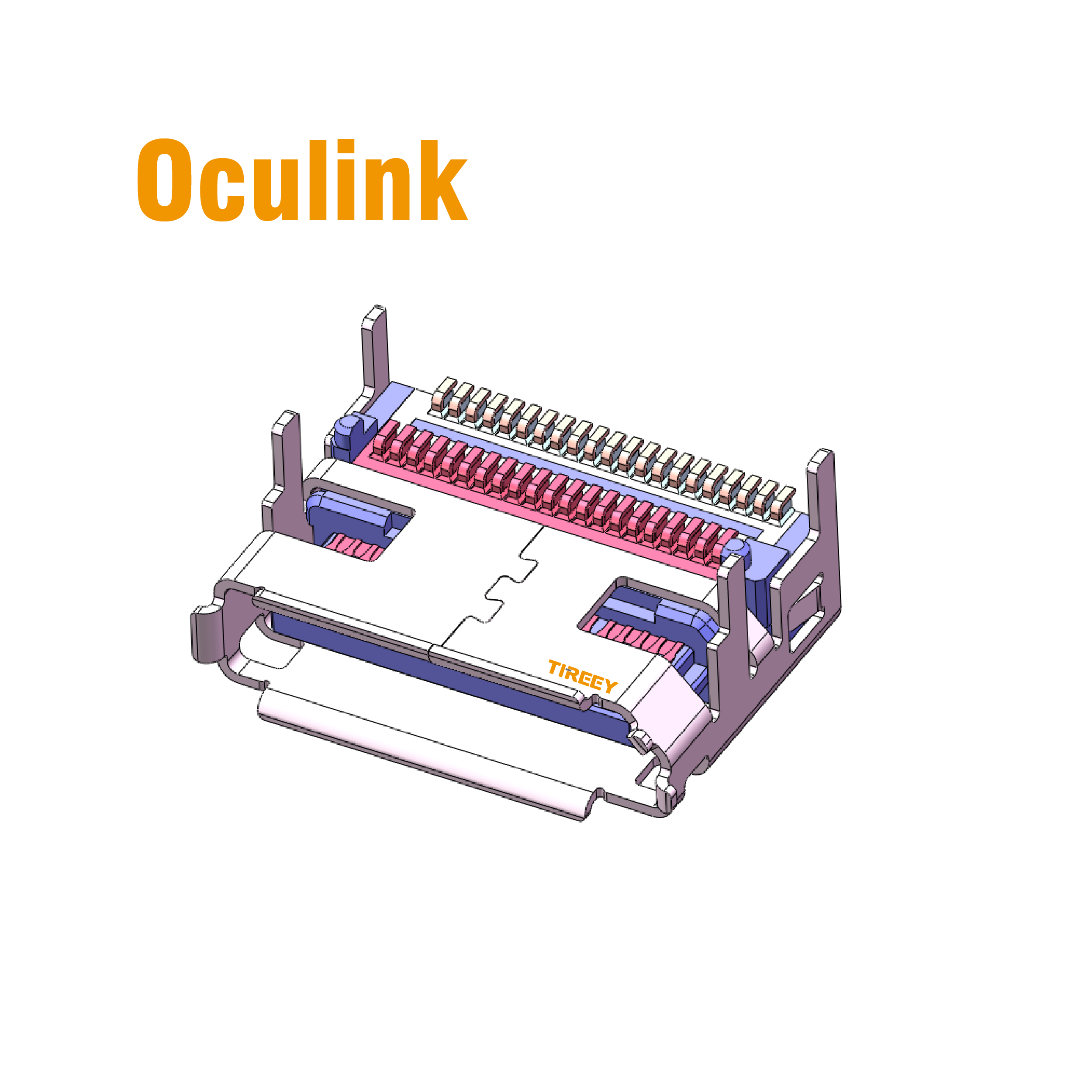 Oculink R/A 4x conn
Oculink R/A 4x conn -
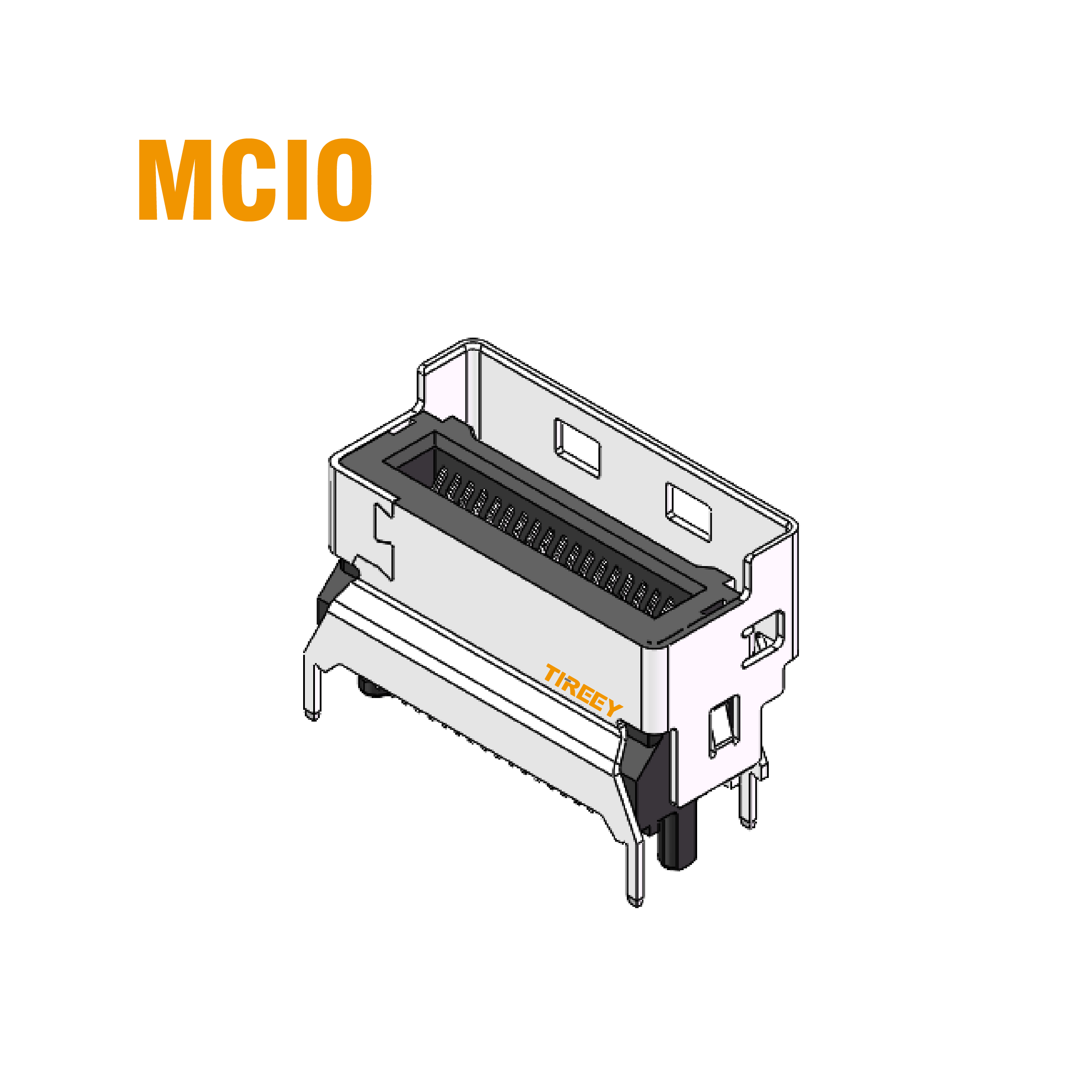 MINI COOL 38Pin 4X Vertical Conn
MINI COOL 38Pin 4X Vertical Conn -
 MINI COOL 74Pin 8X Horizontal Conn
MINI COOL 74Pin 8X Horizontal Conn -
 MINI COOL 74Pin 8X vertical Conn
MINI COOL 74Pin 8X vertical Conn -
 PSAS 68Pin for 24G PCIe/SAS
PSAS 68Pin for 24G PCIe/SAS -
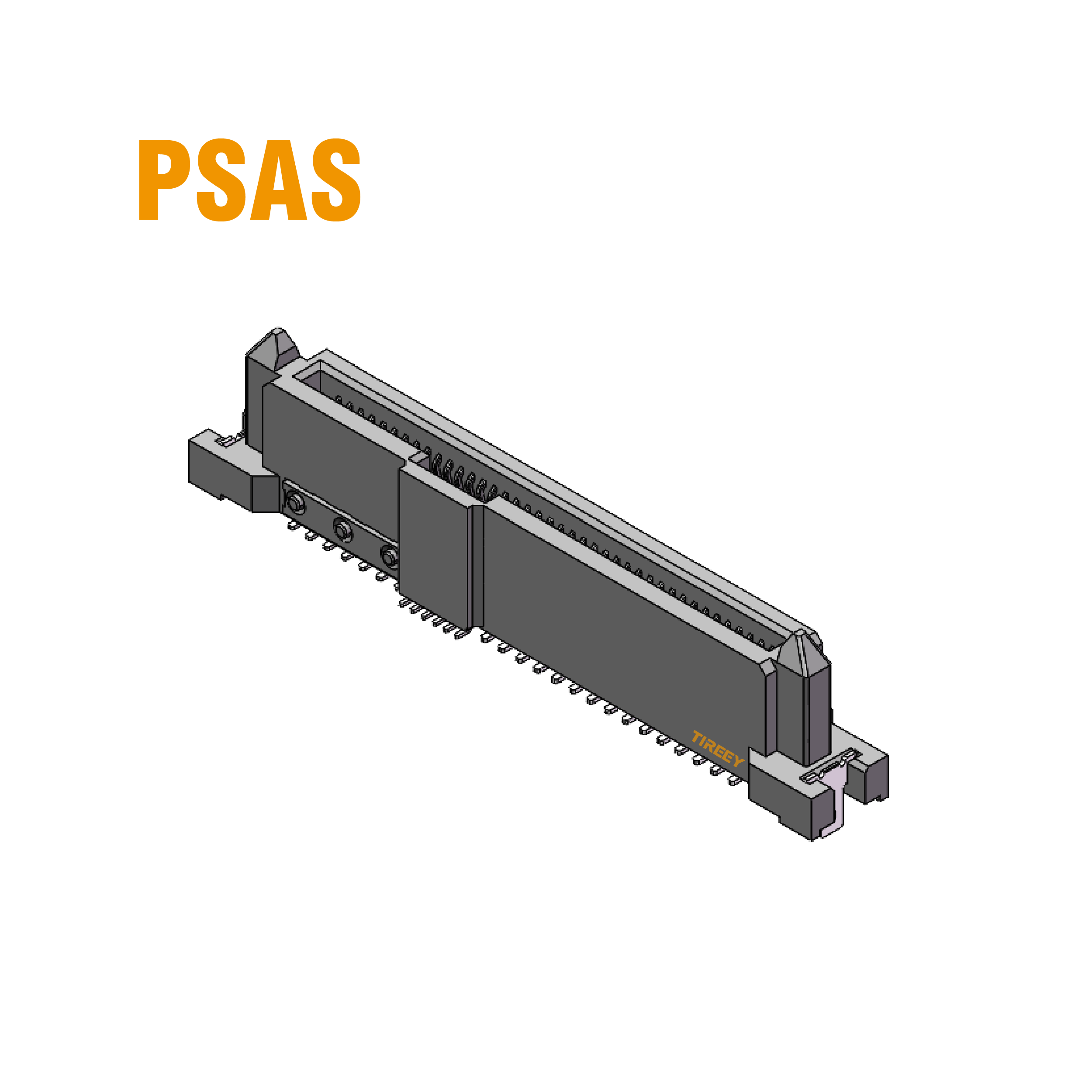 PSAS 68Pin for Pcle 5.0 Specification
PSAS 68Pin for Pcle 5.0 Specification -
 PSAS 68Pin for Pcle 5.0 Specification
PSAS 68Pin for Pcle 5.0 Specification -
 Gen Z4C + Vertical 168Pin
Gen Z4C + Vertical 168Pin -
 Gen Z4C + Splint Type 168Pin
Gen Z4C + Splint Type 168Pin -
 GenZ4C Vertical 140Pin No Iron Case
GenZ4C Vertical 140Pin No Iron Case -
 GenZ4C + Vertical 168Pin + Iron Case
GenZ4C + Vertical 168Pin + Iron Case -
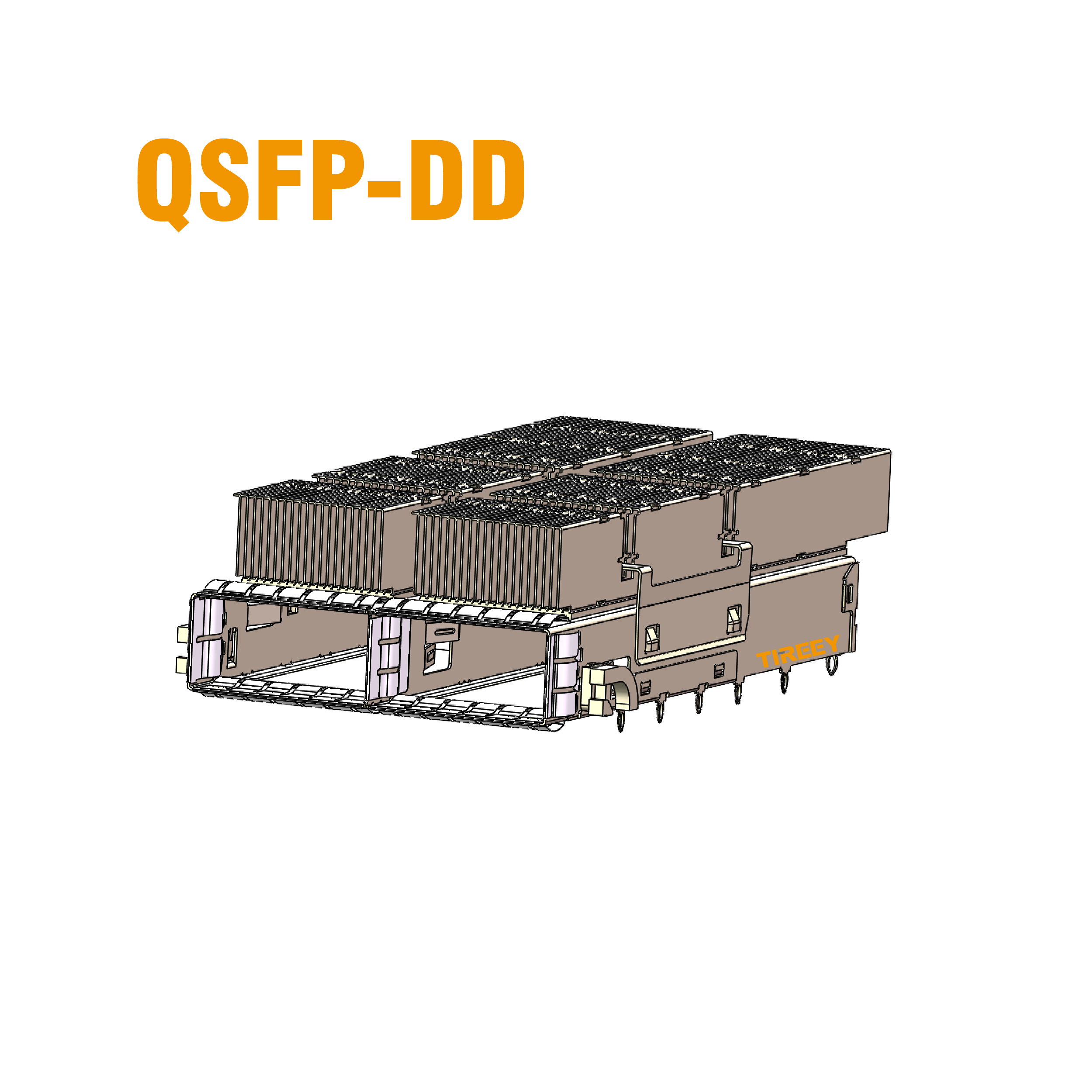 QSFP-DD 1*2 + Radiator
QSFP-DD 1*2 + Radiator -
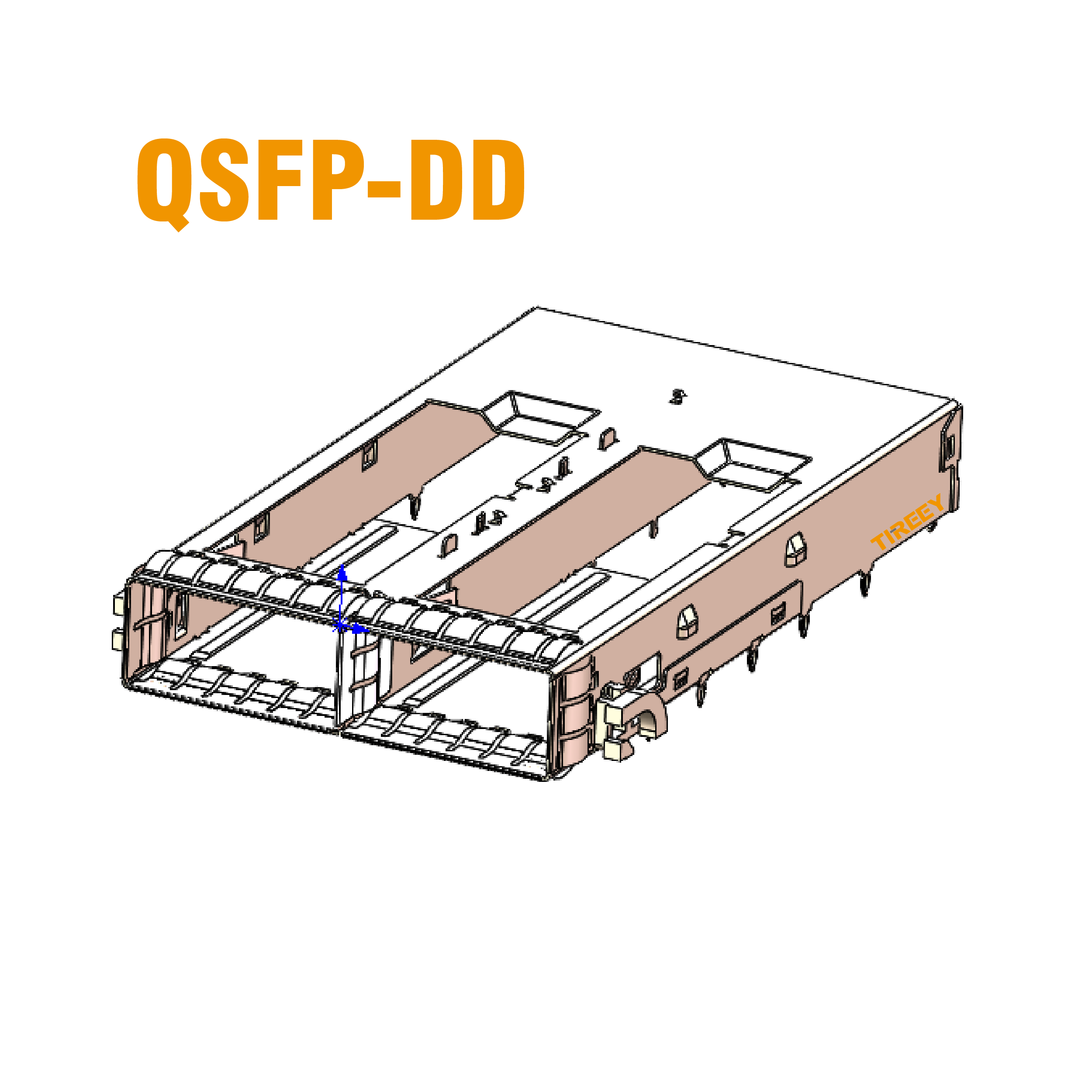 QSFP-DD 1*2 Cage
QSFP-DD 1*2 Cage -
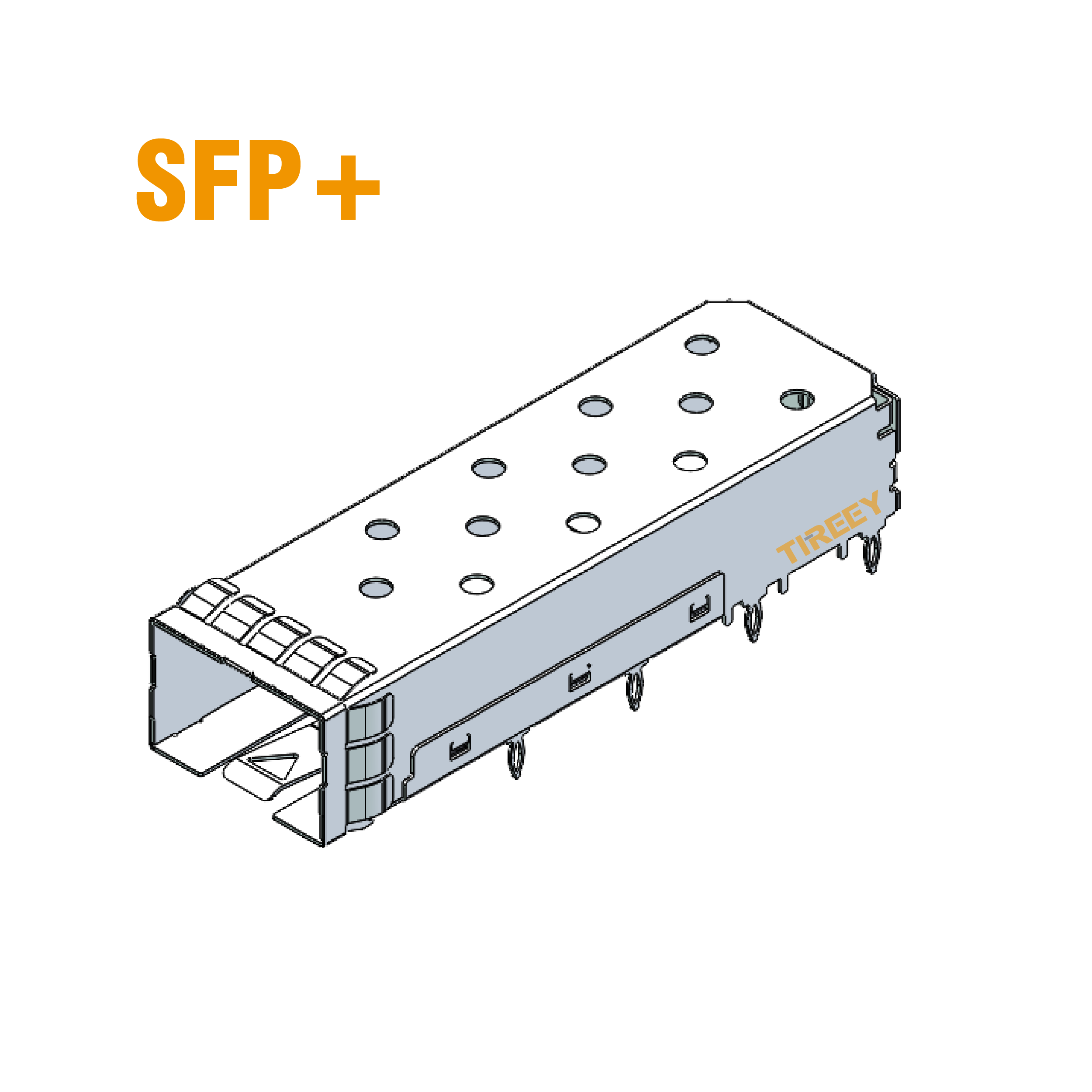 SFP+1*1 Crimp Pin
SFP+1*1 Crimp Pin -
 SFP28 1*1 Crimping With Double-sided Spring Clip
SFP28 1*1 Crimping With Double-sided Spring Clip