Clasificación de productos













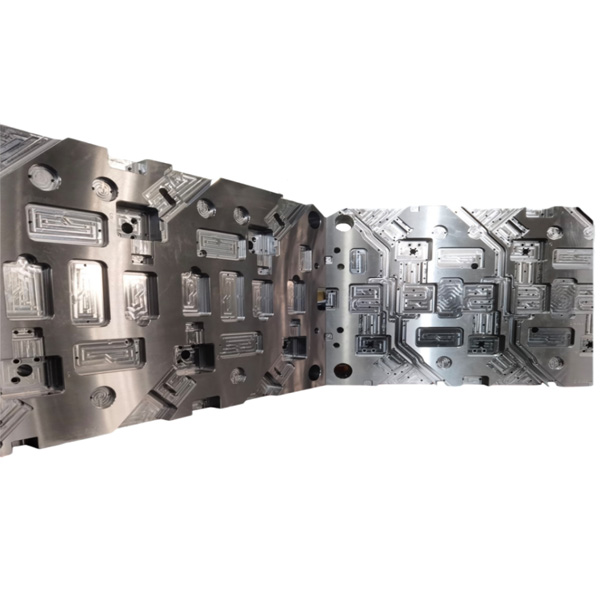












Categoría de estampado




Categoría de inyección de plástico







Categoría de estampado

Categoría de inyección de plástico











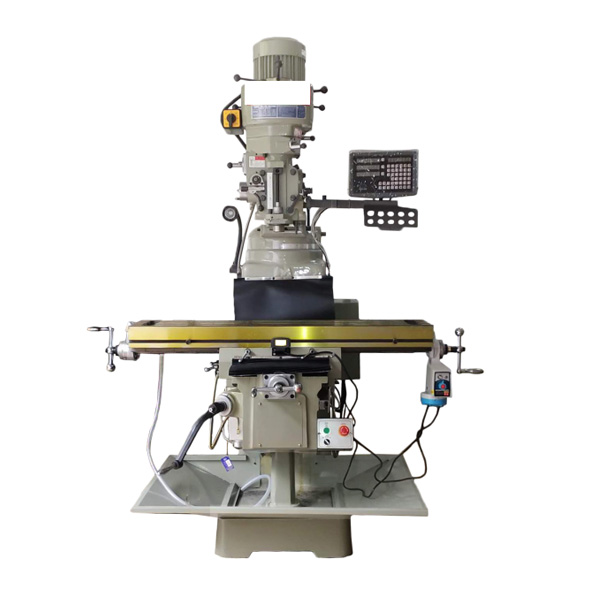
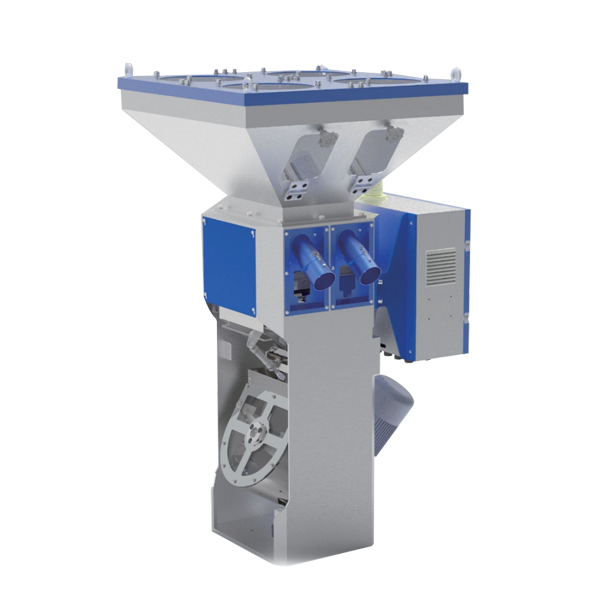
Equipos auxiliares
Equipos estándar

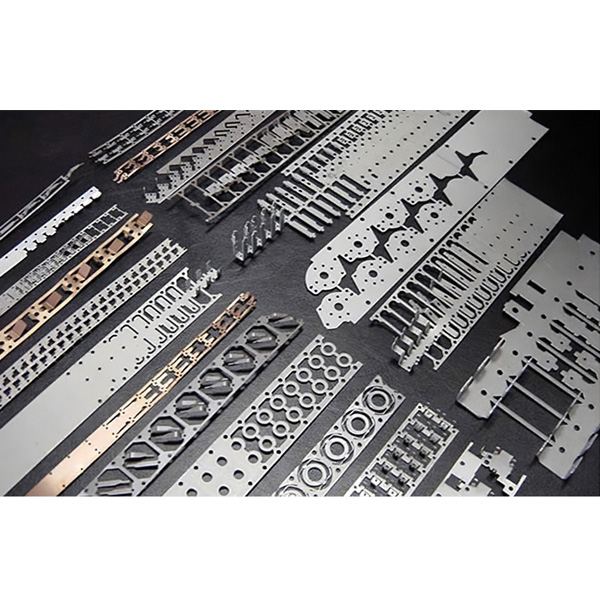
Componentes estándar
Equipos auxiliares

Tireey Conector
-
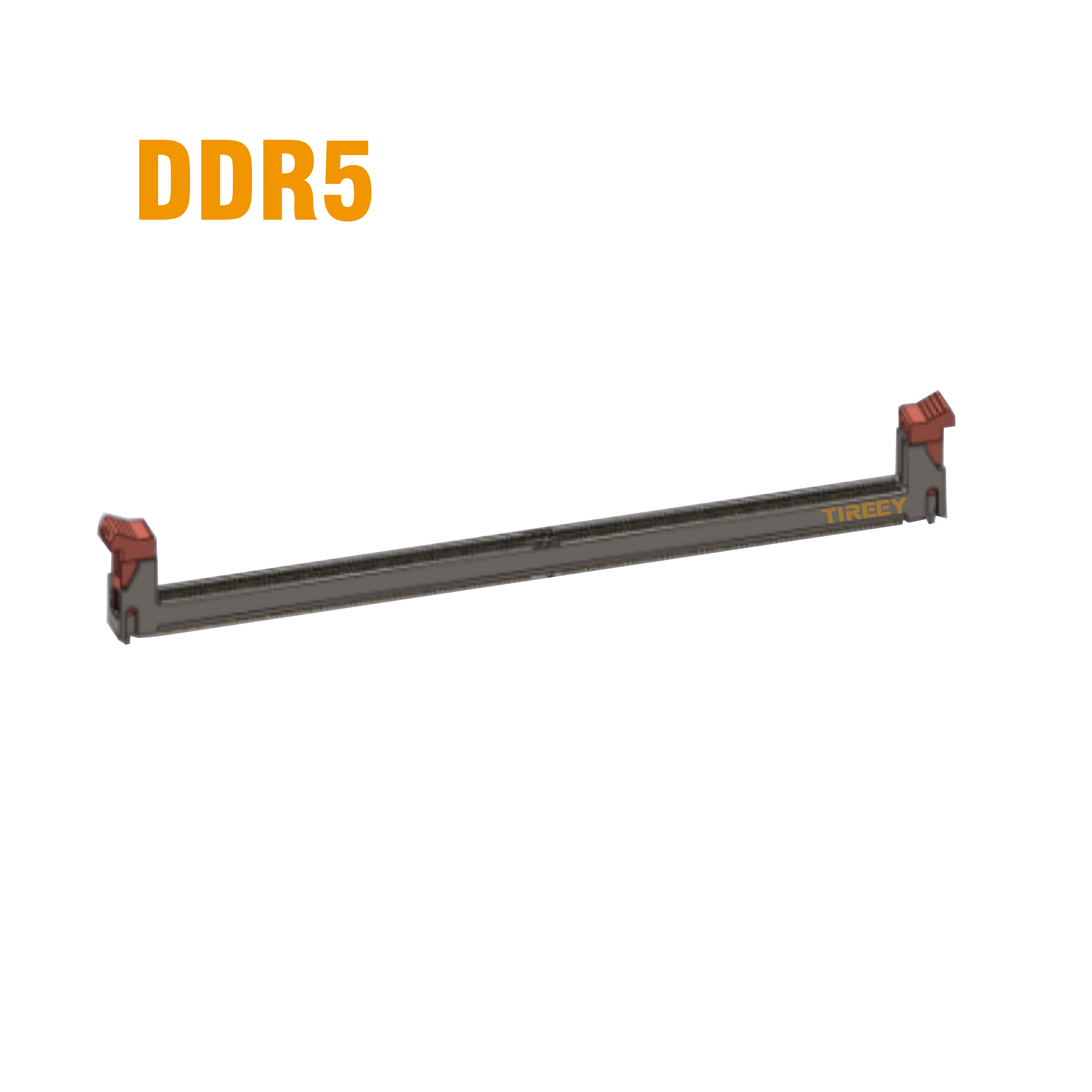 DDR5 288Pin vertical SMT+DIP 20.6H
DDR5 288Pin vertical SMT+DIP 20.6H -
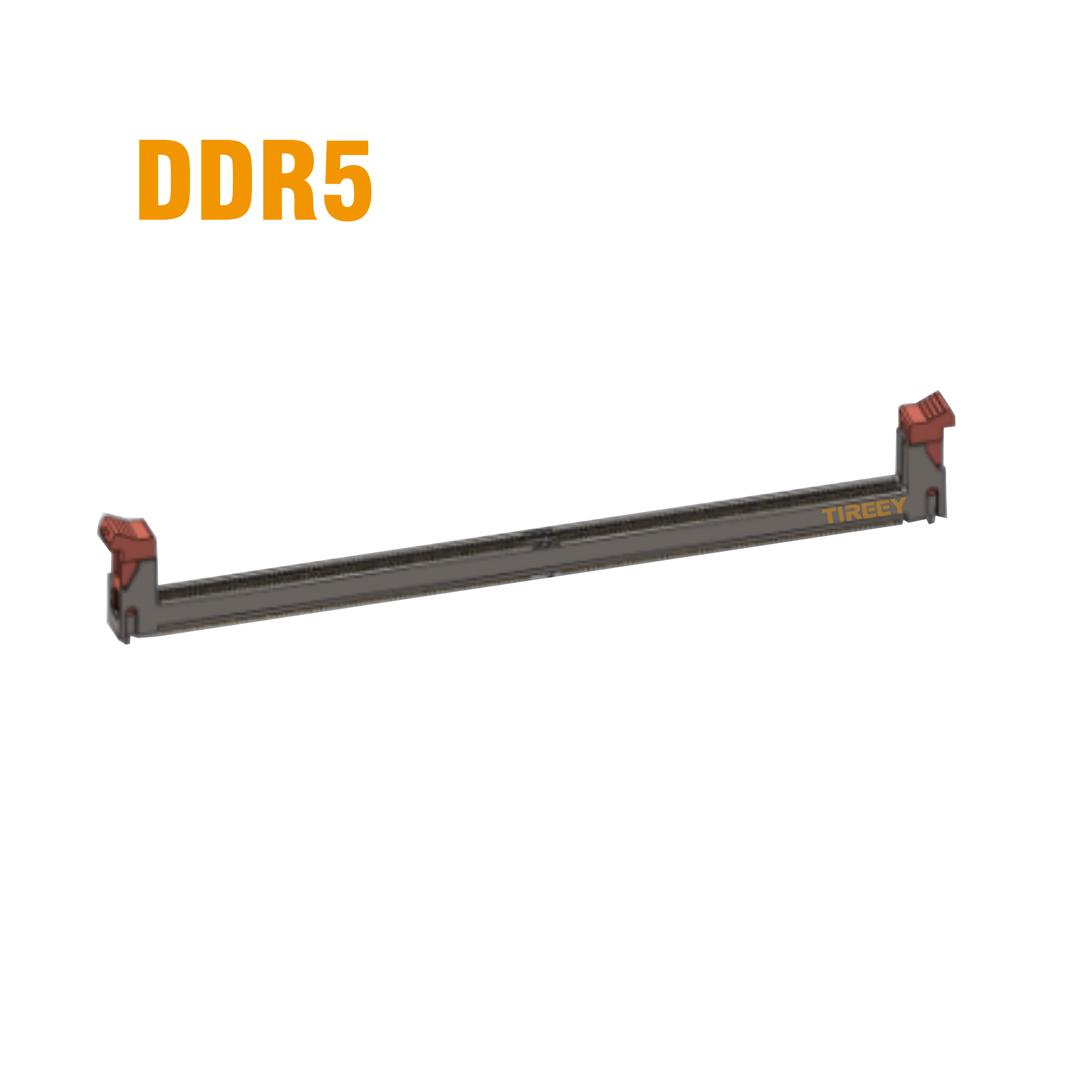 DDR5 288Pin vertical SMT+DIP 20.6H Especificación de hebilla simple
DDR5 288Pin vertical SMT+DIP 20.6H Especificación de hebilla simple -
 DDR5 SO DIMM 262Pin STD 5.2H
DDR5 SO DIMM 262Pin STD 5.2H -
 DDR5 SO DIMM 262Pin RVS 8.0H
DDR5 SO DIMM 262Pin RVS 8.0H -
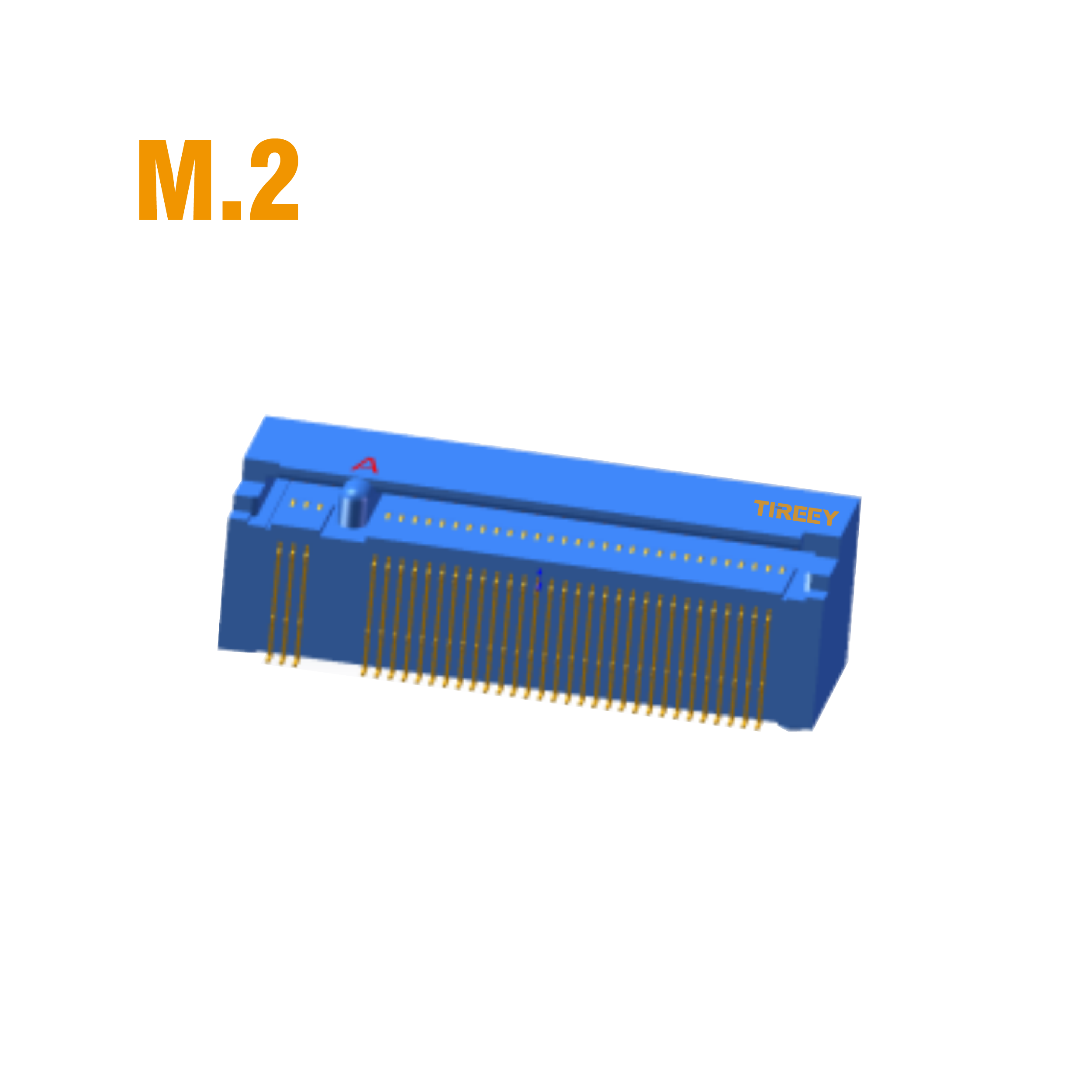 M.2 GEN4 H=8.5 A KEY CONN
M.2 GEN4 H=8.5 A KEY CONN -
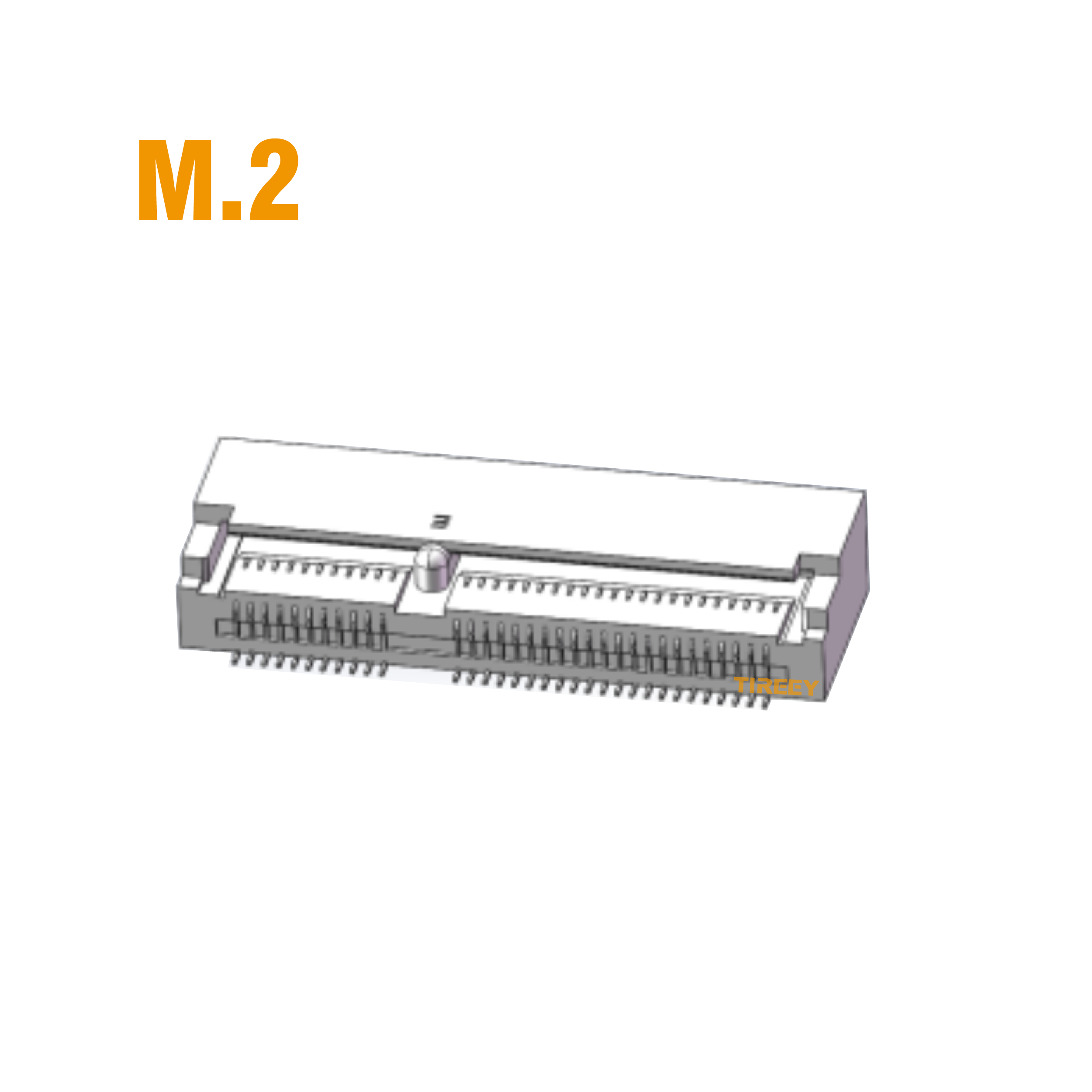 M.2 GEN4 H=4.0 M KEY CONN
M.2 GEN4 H=4.0 M KEY CONN -
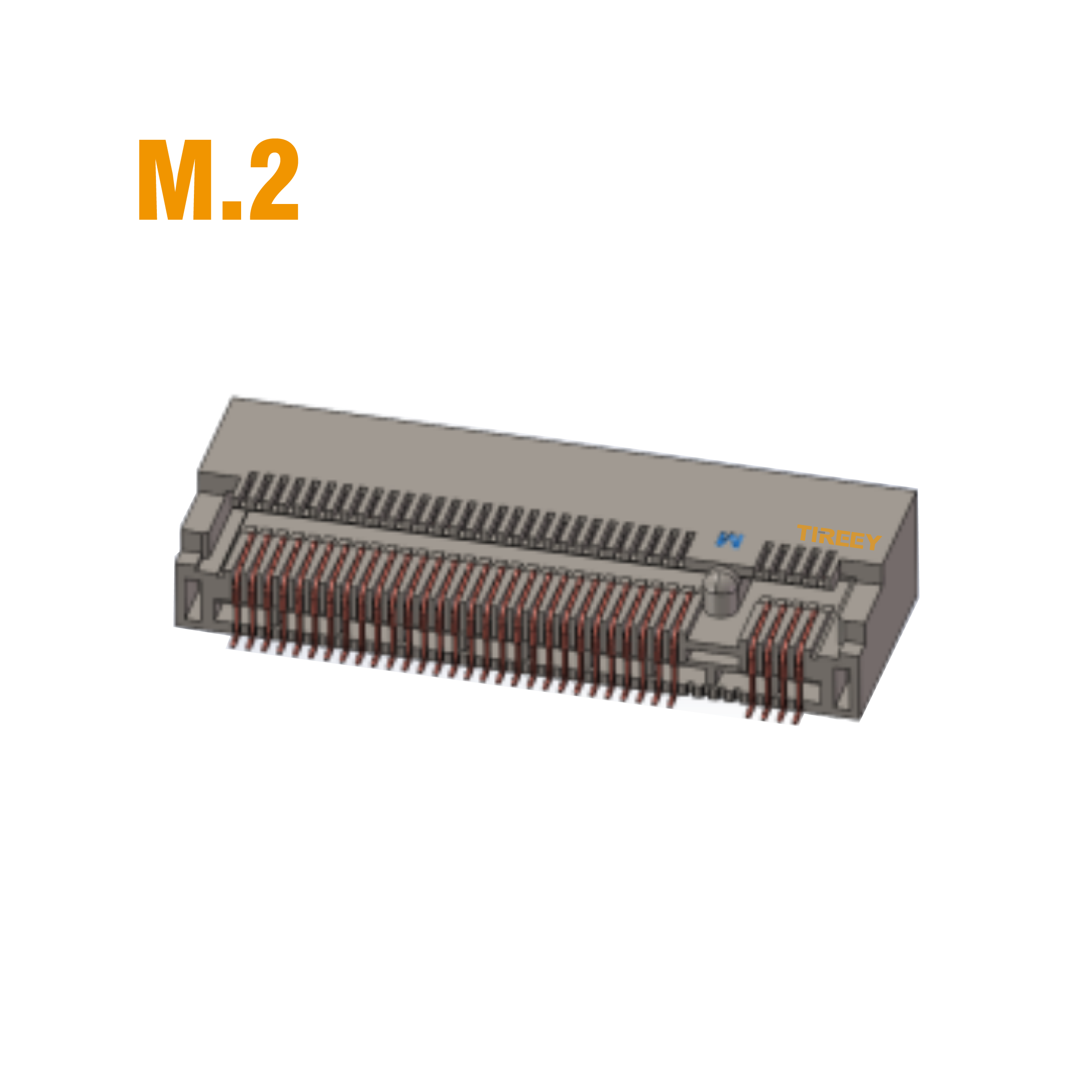 M.2 GEN4 H=4.0 E KEY CONN
M.2 GEN4 H=4.0 E KEY CONN -
 DDR4 288PIN DIP
DDR4 288PIN DIP -
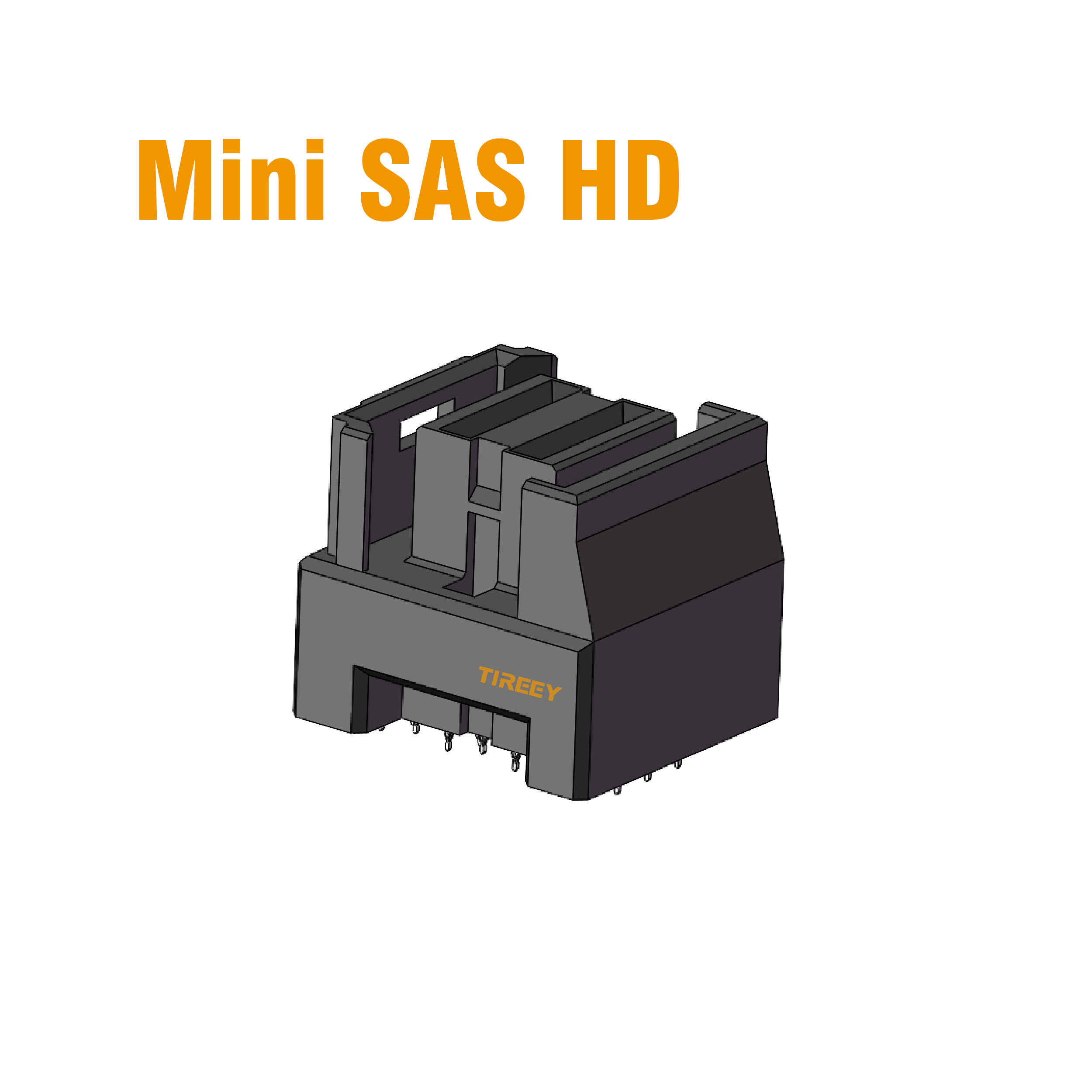 Mini SAS HD Vertical 36P Conn
Mini SAS HD Vertical 36P Conn -
 PCIE4.0 8X 98Pin Tipo SMT
PCIE4.0 8X 98Pin Tipo SMT -
 PCIE4.0 16X 164Pin con cola + carcasa de hierro Tipo DIP
PCIE4.0 16X 164Pin con cola + carcasa de hierro Tipo DIP -
 PCIE5.0 16X 164Pin Tipo SMT
PCIE5.0 16X 164Pin Tipo SMT -
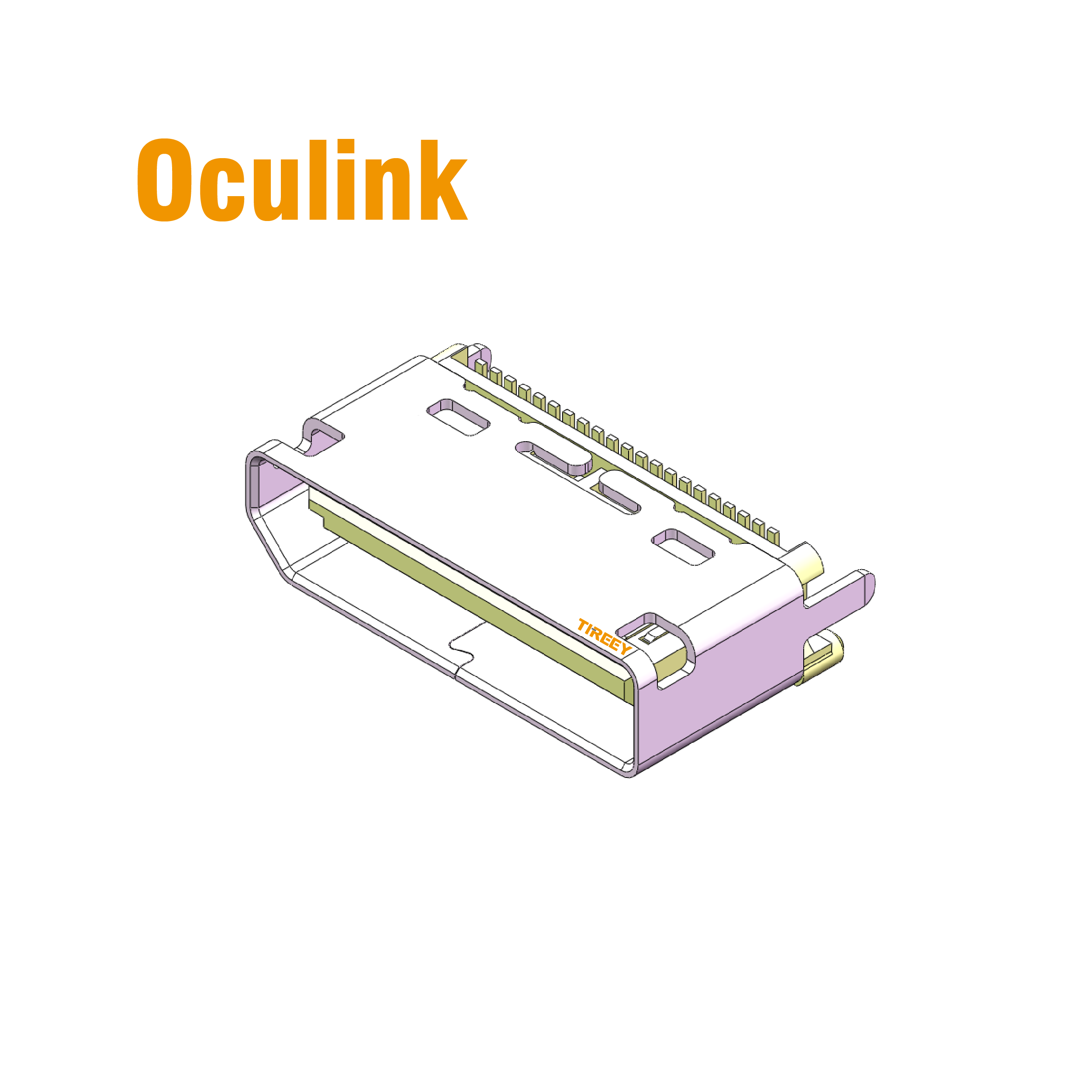 Oculink V/T 4x conn
Oculink V/T 4x conn -
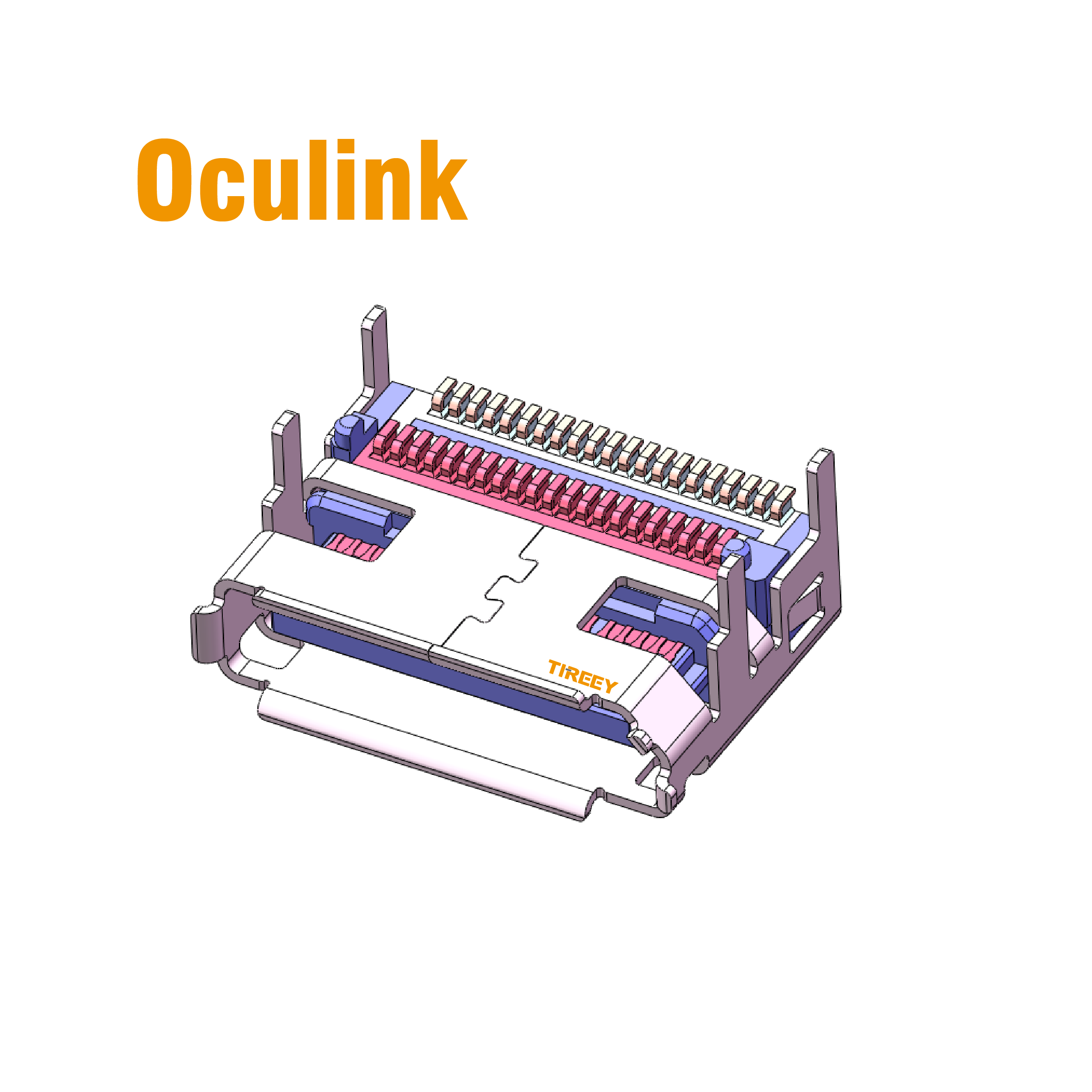 Oculink R/A 4x conn
Oculink R/A 4x conn -
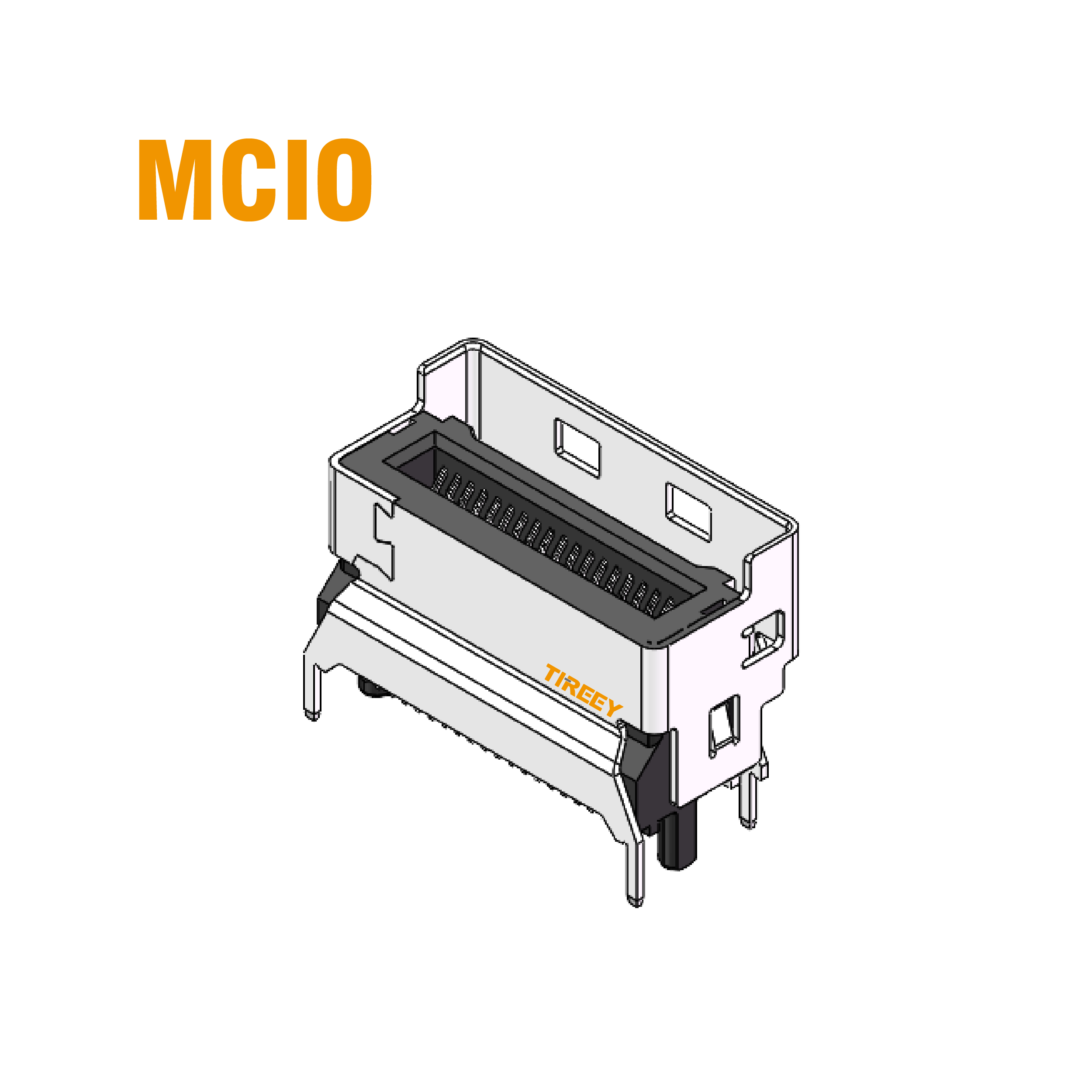 MINI COOL 38Pin 4X vertical Conn
MINI COOL 38Pin 4X vertical Conn -
 MINI COOL 74Pin 8X horizontal Conn
MINI COOL 74Pin 8X horizontal Conn -
 MINI COOL 74Pin 8X vertical Conn
MINI COOL 74Pin 8X vertical Conn -
 PSAS 68Pin for 24G PCIe/SAS
PSAS 68Pin for 24G PCIe/SAS -
 PSAS 68Pin for PCIe Especificación 5.0
PSAS 68Pin for PCIe Especificación 5.0 -
 PSAS 68Pin for PCIe Especificación 5.0
PSAS 68Pin for PCIe Especificación 5.0 -
 Gen Z 4C+vertical 168Pin
Gen Z 4C+vertical 168Pin -
 Gen Z 4C+ tipo clip 168Pin
Gen Z 4C+ tipo clip 168Pin -
 Gen Z 4C vertical 140Pin sin carcasa de hierro
Gen Z 4C vertical 140Pin sin carcasa de hierro -
 Gen Z 4C+ vertical 168Pin + carcasa de hierro
Gen Z 4C+ vertical 168Pin + carcasa de hierro -
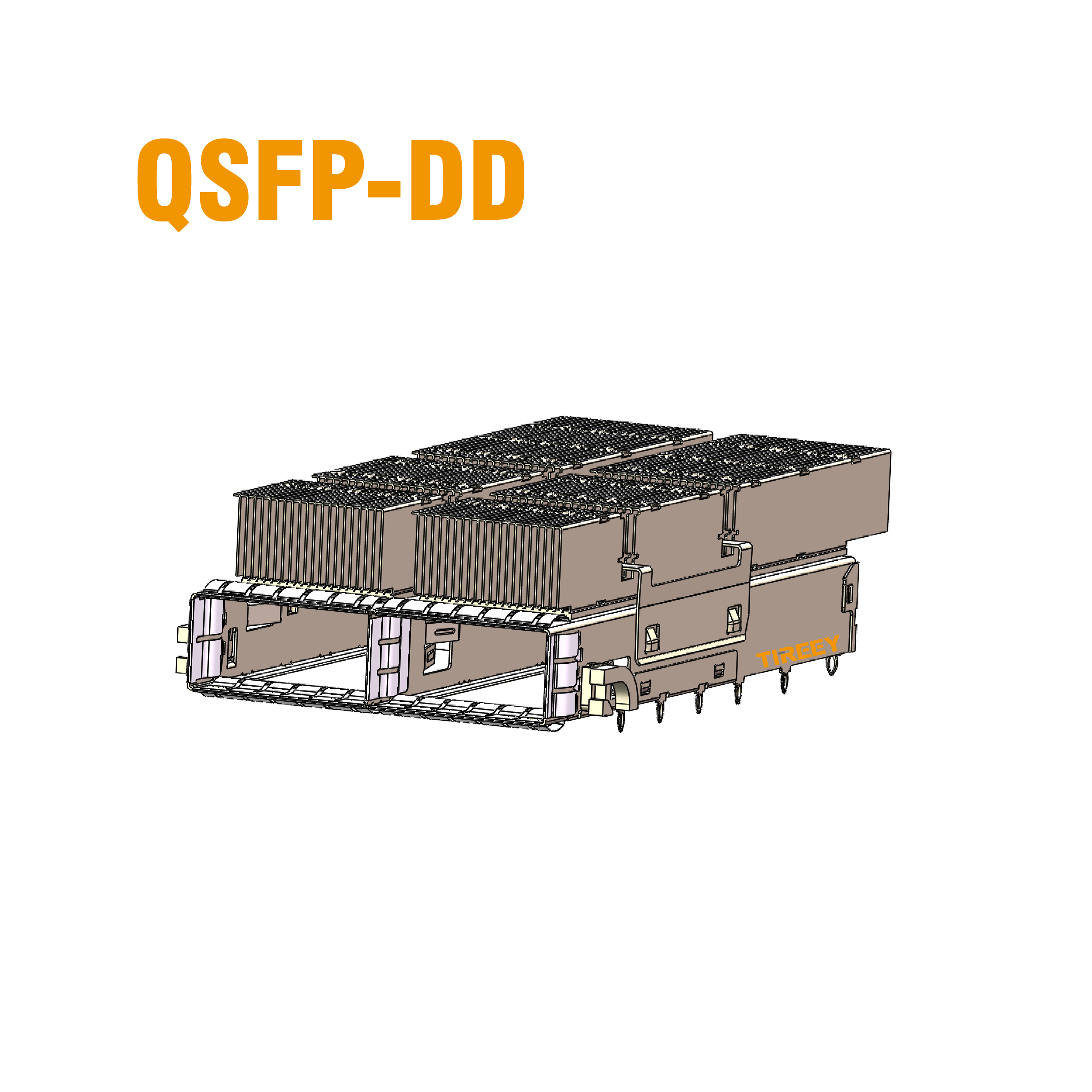 QSFP-DD 1*2+ disipador de calor
QSFP-DD 1*2+ disipador de calor -
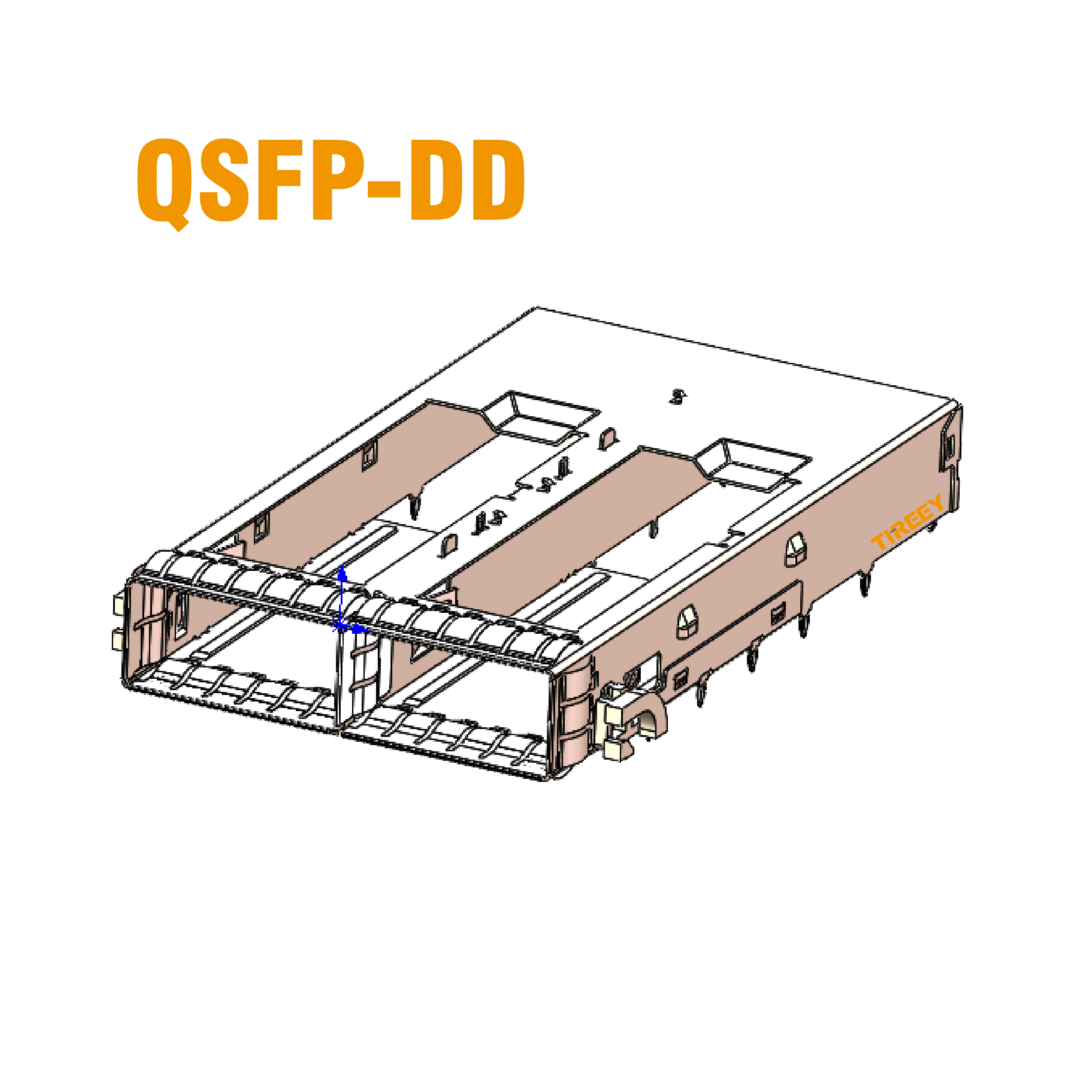 QSFP-DD 1*2 Jaula
QSFP-DD 1*2 Jaula -
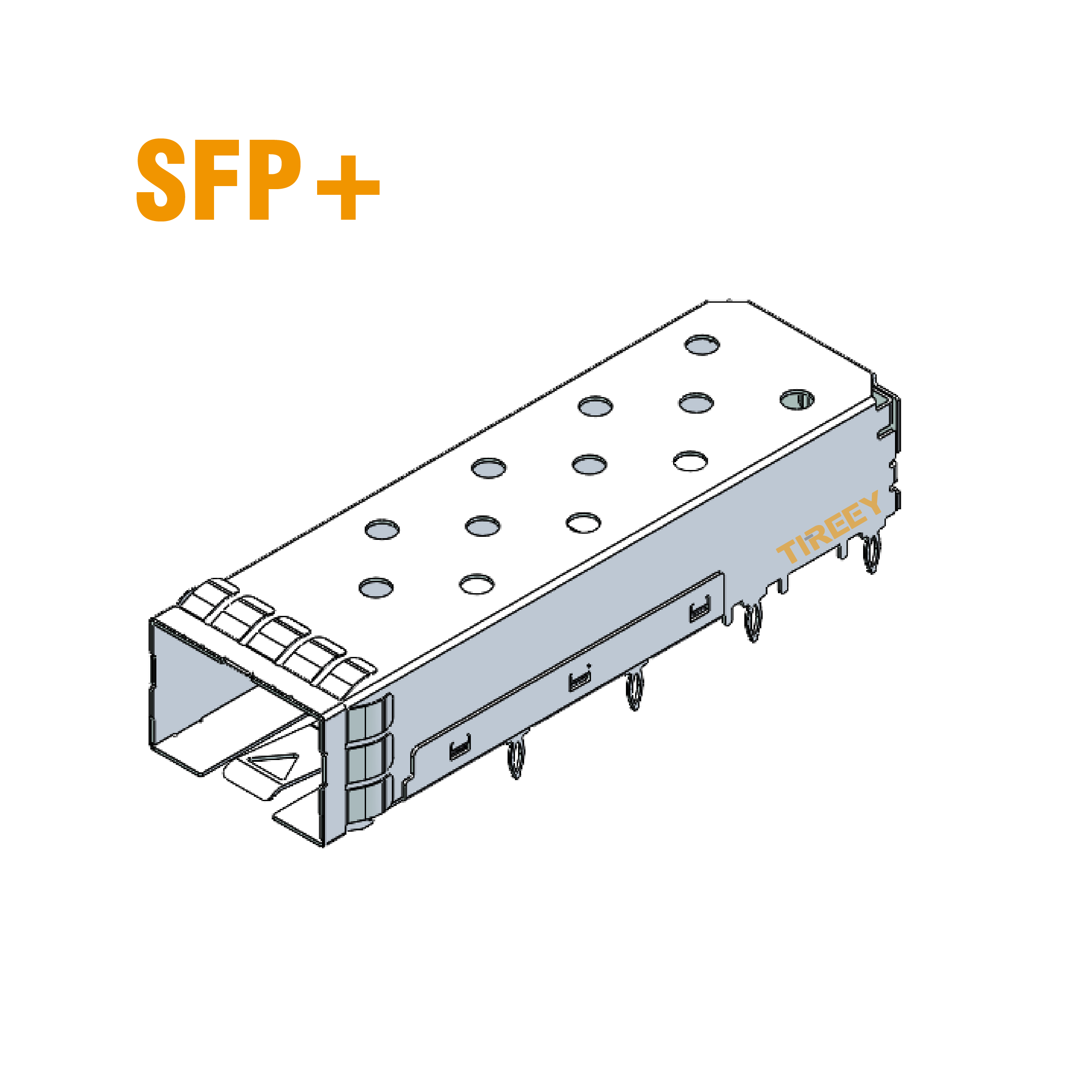 SFP+ 1*1 Pin de compresión
SFP+ 1*1 Pin de compresión -
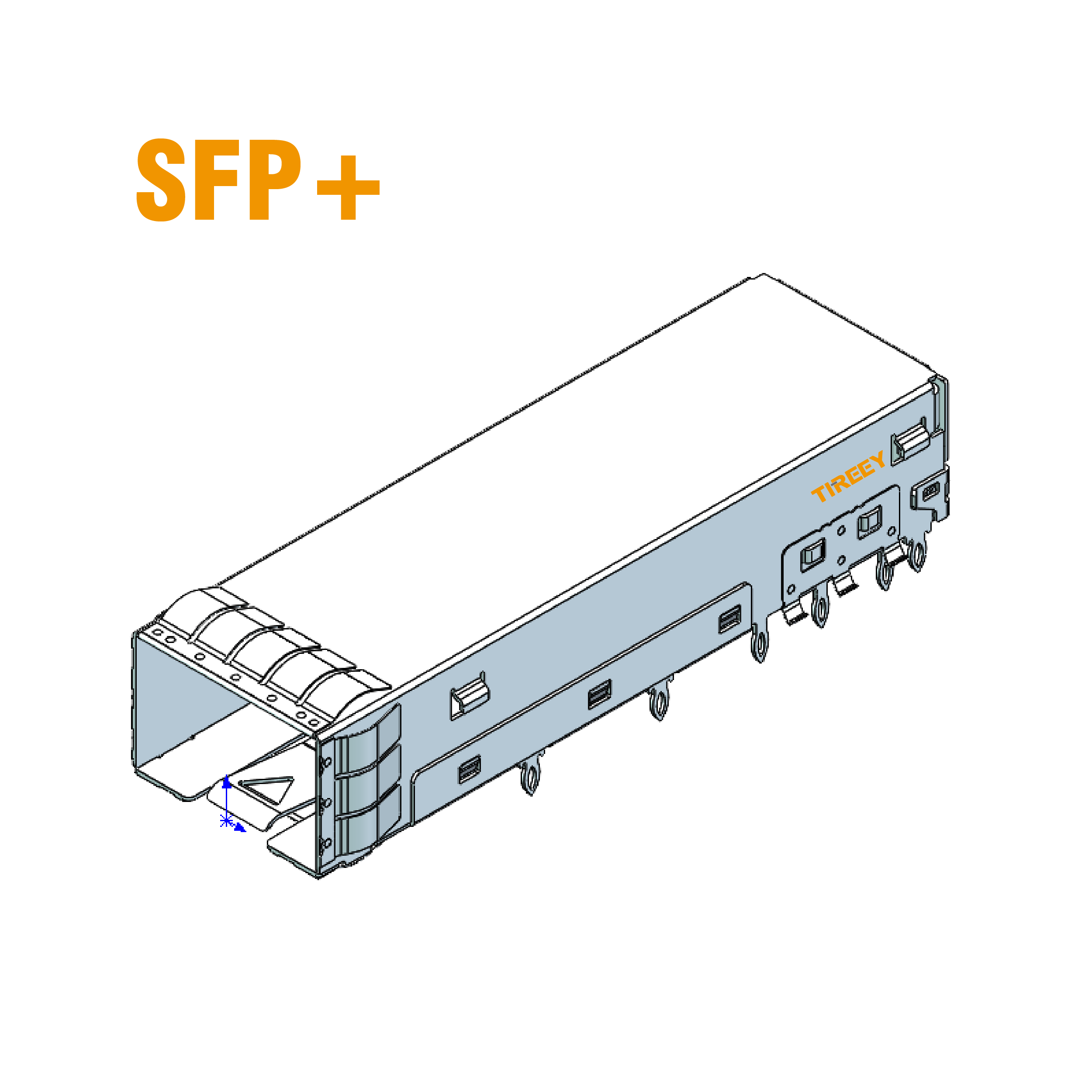 SFP28 1*1 Pin de compresión con resortes dobles
SFP28 1*1 Pin de compresión con resortes dobles




















 Barrer
Barrer

